#Azimuth 66
Video

flickr
Tales and Adventures of Exploring Grand Canyon National Park by Mark Stevens
Via Flickr:
While walking the Rim Trail.
#Nikon D850#Azimuth 66#Looking ENE#Arizona Petrified Forest National Park and Sedona#Day 4#Grand Canyon National Park#Rim Trail#Erosion#Canyon#Eroded Canyon#Striation of Rock Layers#Kaibab Limestone#Colorado Plateau#Layered Rock#Plateaus#Plateau#Gorge#Cliffs#Colorful Landscape#Intricate Landscape#Exposed Layers of Rock#Intermountain West#Grand Canyon Plateaus#Coconino Plateau#Kaibab Plateau#Project365#High Desert#DxO PhotoLab 4 Edited#Landscape#Landscape - Scenery
3 notes
·
View notes
Photo

Cornell-led telescope project completion in sight The construction of the Fred Young Submillimeter Telescope (FYST) being developed by CCAT Observatory Inc., an international consortium of universities led by Cornell, is drawing to a close. Work is poised to begin on a defining feature of the telescope – the “elevation” part that supports the upper structure and will contain the telescope’s mirrors. Unlike almost any other telescope to date, the part will be constructed from Invar, a special formulation of steel that has an extremely low coefficient of thermal expansion. “This means that it doesn’t get bigger when it’s hot and it doesn’t shrink when it’s cold,” said Jim Blair, FYST project manager in the Department of Astronomy, in the College of Arts and Sciences. “At least, it’s greatly, greatly reduced with Invar compared to regular steel. And that’s important for the science because, at the wavelengths we are looking at, thermal expansion would actually affect the data and could ruin it.” Thus, despite some similarities to other telescopes, Blair said, the FYST “will be able to look regularly at frequency ranges very few other telescopes can even detect because of some of these design elements and material choices.” The telescope’s mirrors are also cutting-edge technology, Blair said. They’re being built in the Netherlands by Airborne, one of the world’s premier carbon fiber companies. “Like the Invar we’re using for the elevation structure, the mirrors are the ‘secret sauce’ to being able to do our science,” he said. “Physicists have known how to measure in the submillimeter frequency ranges that the FYST is targeting for a long time, but before now nobody’s been able to build a telescope to do it – at least not at an affordable price. The carbon fiber structures that are supporting our mirrors are absolutely state of the art.” The internal steel skeletal structures for yoke arms A and B, which will hold the three-story-tall elevation part in place, are almost complete. Once the elevation part is finished, all these massive sections will be mounted on top of the already-completed lower portions, and the telescope will be nearly assembled. The project team estimates that by the end of 2023 they will begin to test the telescope in Germany. Fred Young ’64, M.Eng. ’66, MBA ’66, after whom the telescope is named in appreciation for his generous support of the project, recently visited the construction site. “Seeing the beginning of the construction of the telescope in Germany was enormously satisfying as the culmination of many years of planning and preparation,” he said. “What was particularly striking was the enormous size of the rotating azimuth base which is the first element to be completed. The rapid and precisely controlled movement facilitated by large electric motors was an impressive demonstration of its ability to scan the sky. We clearly have much to look forward to now.” IMAGE....A construction crew does precast work on the foundation of the Fred Young Submillimeter Telescope. CREDIT Cornell University
0 notes
Photo

7/26(火) ・ 朝からものすごい雷と雨でしたね⚡️☂️ 本日は13:00〜22:00で営業しております。 夜の時間帯はご予約でほぼ満席ですが、ご予約の時間帯がバラけてますため、タイミング次第でスムーズにご案内できます。ご来店前にお電話でご確認ください☎️ 明日、明後日は定休日、金曜日は12:00〜愛ある食卓 @aiarushokutaku のマルシェ。大ロングセラーだったイ・ヴィニ・ディ・ジョヴァンニ @giovannibattistamesina のオリーブオイル、新しいヴィンテージが入荷します!ぜひよろしくお願いいたします😊 通常営業は18:00〜24:00です。今週末はどの日もまだお席に空きがあります。 ・ オーストリアの若き女性醸造家、ジュリー=アン・ハンスヨーステンの造るこちらはボタニカル・スパークリング。つまりハーブティーをブドウ果汁で瓶内発酵させたもの。 アルコール度数も5%と低く、様々な薬効成分があるといわれるネトル(西洋イラクサ)の香りも鮮やかです。 ぜひお試しくださいませ🍷 ・ ご予約、お問い合わせは0466-66-6409、またはinstagram、メッセンジャーまで、お待ちしてます🎶 (Auto Reserveでのご予約は承っておりません) *ハヤシコウさんデザインのMONKの4周年ポスター、好評販売中です‼️ ・ お店の営業時間にかかる音楽をイメージして作ったプレイリストがApple music、Spotifyにてお聴きいただけます🎧 最新版の選曲はインストゥルメンタルのみ、バーバリックワークスのビールの名前の元ネタにもなっている"WHISTLE SONG"も収録です。 ぜひお楽しみくださいませ♬ ・ Apple music↓ https://music.apple.com/jp/playlist/instrumental-mood-13-00-22-00/pl.u-06oxDWAIWX3z8rG?l=en ・ Spotify↓ https://open.spotify.com/playlist/7cSS00XIJZ1N50TTpdzU9G?si=1qjyfyObQ1iwpAVvD2Nd2g ・ ・ ・ #monk #monktsujido #辻堂 #辻堂ランチ #辻堂昼飲み #辻堂ディナー #辻堂ワインバー #辻堂イタリアン #ナチュラルワイン #vinnaturel #vinonaturale #naturalwine #craftbeer #finefood #apero #aperitivo #愛ある食卓 #hochdeutsch #meanettle #botanicalsparkling #biodynamicsparkling #azymuth #azimuth #お一人様歓迎 #お子様連れok #スナック跡地 (MONK Tsujido) https://www.instagram.com/p/CgdgbG-P8sV/?igshid=NGJjMDIxMWI=
#monk#monktsujido#辻堂#辻堂ランチ#辻堂昼飲み#辻堂ディナー#辻堂ワインバー#辻堂イタリアン#ナチュラルワイン#vinnaturel#vinonaturale#naturalwine#craftbeer#finefood#apero#aperitivo#愛ある食卓#hochdeutsch#meanettle#botanicalsparkling#biodynamicsparkling#azymuth#azimuth#お一人様歓迎#お子様連れok#スナック跡地
0 notes
Note
PS Neither the egg fic nor the vegan freak have anything to do with M/gastar before you try it. That's all pure Starscream stanning, baby. And one of them is St/rop, the supposedly ""good""" ship LOL.
List of female Transformers Main Complete list Following is a thorough list of the various female Transformers in canon thus far. Many of these characters were Japan-exclusive, featured only in fiction, or exist as limited-run exclusive toys. Female characters who had multiple toys are listed only once. Generation 1 (Numbers indicate order of appearance.) Chromia (1) Moonracer (2) Firestar (3) Elita One (4) Greenlight (5) Lancer (6) Arcee (7) Beta (8) An Autobot rebel (9) Paradron Medic (11) Nancy (12) Minerva (13) Clipper (14) Karmen (18) Glyph (20) Road Rage (21) Discharge[1] (22) Windy[1] (23) Vibes (24) Roulette (25) Flareup (32) Flip Sides (34) Rosanna (35) Windrazor (38) Thunderblast (46) Cassiopeia (47) Nautica (51) Windblade (52) Victorion (61) Velocity (63) Javelin (62) Proxima (64) Roadmaster (65) Acceleron (66) Override (69) Rust Dust (70) Pyra Magna (71) Skyburst (72) Stormclash (73) Jumpstream (74) Dust Up (75) Scorpia[1] (76) Eos (80) Lifeline (83) Quickslinger (84) Hotwire[2] (98) Strongarm (99) Slide[2] (104) Crush Bull[2] (107) Oiler[2] (108) Broadside[2] (109) Sky High[2] (110) Circuit[2] (116) Pyra Ignatia Spark[2] (118) Scorchfire (122) Orthia (126) Smashdown[2] (128) Esmeral (15) Lyzack (16) Clio (17) Nightracer (19) Shadow Striker (26) Howlback (31) Flamewar (33) Flip Sides (34) Crasher (39) Freezon[1] (44) Nightracer (49) Slipstream (50) Twirl (54) Nickel (60) Swift (77) Killjoy (79) Blackout[2] (81) Spaceshot[2] (82) Crash Test (85) Trickdiamond (92) Moonheart (93) Megaempress (94) Flowspade (95) Lunaclub (96) Megatronia (100) Buckethead[1] (103) Diveplane[1] (112) Seawave[1] (113) Mindgame (114) Tracer[2] (115) Devastator[2] (117) Cindersaur[2] (125) Shadow Striker (127) Nova Storm[2] (129) Termagax (133) Kaskade (135) Heavywait (138) Tyrannocon Rex (139) Cheesecake robot (10) Roulette and Shadow Striker's sister (27) Path Finder (28) Small Foot (29) Devcon's galpal (30) One of Optimus Prime's rescuees (36) Angela (37) Four members of the Kaon upperclass (40-43) Ma-Grrr (45) Red waitress Transformer (48) Windshear (53) Solus Prime (55) Female protester (56) Lightbright (57) Strafe (58) Mistress of Flame (59) Exocet (67) Vertex (68) Aileron (78) Gnash (86) Slice (87) Thrashclaw (88) Shred (89) A pair of Devisen twins (90-91) Maxima (97) Sieg[3] (101) Kari (102) Anode (105) Lug (106) X-Throttle (111) Rum-Maj (119) Praesidia Magna (120) Fastbreak (121) Crash Test (122) Stardrive (123) Magrada (124) Leviathan (130) Codexa (131) Gauge (132) Lodestar (134) Shutter (136) Sharpclaw (137) Cargohold (140) Half-qualifiers: Alana, turned into a Transformer for a short time. Aunty, female Cybertronian intelligent computer. Combination granny and attack-dog-bots, human-sized drones supposedly based on Transformer technology. One of Maccadam's bartenders Nightbird Overlord, has a female side to him. Some of the "Teletraan" computers like 15 and 10 are female. There appears to be a female design among a group of old generics. Bayonet, the fake female Decepticon disguise of Britt. In the French dub of The Transformers: The Movie, Shrapnel and Starscream are considered female. Shrapnel is also female in the Russian dub. Beast Era (Numbers indicate order of appearance.) Airazor (2) Kitte Shūshū (5) Rage (6) Botanica (7) Sonar[1] (13) Crystal Widow (14) Crossblades (15) Stiletto (16) Transmutate[1] (18) Binary (19) Wedge Shape[1] (24) Aura (25) Legend Convoy[1] (26) Stockade[2] (28) Rav (29) Hammerstrike[2] (31) Triceradon[2] (35) Skimmer (36) Nyx (44) Blackarachnia (1) Scylla (3) Antagony (4) Strika (8) Manta Ray[1] (17) Ser-Ket (20) Dead-End[2] (27) Jai-Alai (30) Max-B[2] (32) Gaidora (33) Soundbyte/Soundbite (34) Liftoff (37) Freefall (38) Snarl-blast[2] (39) Vertebreak (43) Skold (45) Libras (9) Virgol (10) Cancix[1] (11) Possibly Sagittarii (12) Dipole (21) Vamp (22) Plasma[2] (23) Deep Blue (40) At least two bridge officers of the Terrastar (41-42) Half-qualifiers: NAVI-ko, female Cybertronian intelligent computer NAVI (Yukikaze), female Cybertronian intelligent computer NAVI (Gung Ho), female Cybertronian
intelligent computer DNAVI, female Cybertronian intelligent computer Medusa, an Intruder-built robot modified with Cybertronian technology Robots in Disguise (2001) (Numbers indicate order of appearance.) Optimus Prime[2] (1) Nightcruz[1] (3) Scourge[2] (2) Half-qualifiers: T-AI, female Cybertronian intelligent computer. Unicron Trilogy (Numbers indicate order of appearance.) Airazor (5) Arcee (9) Autobot nurses (10) Two Velocitronian band members (11-12) Override[4] (13) Joyride[4] (15) Quickslinger (16) Crystal Widow (24) Treadbolt (33) Chromia (34) Thunderblast (14) Spacewarp (30) Sureshock (1) Combusta (2) Falcia (3) Twirl (4) Sunburn (6) Cliffjumper[1] (7) Ironhide[1] (8) Spiral[1] (9) Offshoot[1] (17) Breakage[1] (18) Kickflip[1] (19) Mudbath[1] (20) Heavy Metal[1] (21) "Disco ball" (22) Road Rebel[1] (23) Guardian Speed[1] (25) Mugen[1] (26) Bingo/Triac[1] (27) Wedge Shape[1] (28) Sprite (29) Boom Tube (31) Windrazor (32) Rán (33) Half-qualifiers: A possible scooterformer Dark Nitro Convoy, evil clone of a character whose gender was switched in translation Red Alert, minimally-altered release of a toy that was female in Japan Midnight Express, unaltered release of a toy that was female in Japan Hourglass, a female character who might be a Cybertronian Bombshell, a female character who might be a Cybertronian Carillon, a female character who might be a Cybertronian Vector Prime, the former multiversal entity who was female in some universes Movie continuity family (Numbers indicate order of appearance.) Arcee (1) Elita-One (2) Chromia (4) Perihelion (8) HMS Alliance (9) Windblade (13) Fracture (3) Alice (5) Shadow Striker (6) Override[3] (7) Diabla (10) Howlback (11) Shatter (12) Nightbird Airazor Half-qualifiersJetfire claims to have a mother who may or may not have been a Transformer. Animated (Numbers indicate order of appearance.) Sari Sumdac (2) Arcee (3) Elita-1 (4) Red Alert (6) Botanica (8) Flareup (10) Rosanna (11) Glyph (12) Lickety-Split (13) Lightbright (14) Chromia (16) Clipper (17) Quickslinger (18) Kappa Supreme (19) Override Prime (20) Windy (21) Road Rage (25) Flashpoint (26) Minerva (27) Sureshock (28) Nightbeat (29) Sunstreaker (30) Blackarachnia (1) Slipstream (5) Strika (7) Flip Sides (9) Antagony (15) Wingthing (22) Beta (23) Drag Strip (24) Half-qualifiers: Teletran-1, female Cybertronian intelligent computer TransTech (Numbers indicate order of appearance.) Blackarachnia (5) Strika (3) Unnamed medic (1) Andromeda (2) Cyclis (4) Sonar (6) Hammerstrike (7) Scorpia (8) Proxima (9) Half-qualifiers: Axiom Nexus News Editor, a 'bot with one male and one female personality Shattered Glass (Numbers indicate order of appearance.) Crasher (1) Esmeral (6) Howlback (7) Arcee (2) Andromeda (3) Elita-One (4) Strongarm (8) Windblade (9) Nautica (10) Beta (5) Half-qualifiers: Teletraan-X, female Cybertronian intelligent computer. Aligned continuity family (Numbers indicate order of appearance.) Akiba Prime Arc Arcee Arcee Blade Assault Star Brushfire Cameo Catapult Chevalier Chromia Deep Blue Ether Walker Firestar Galaxy Flare Galaxy 'Questrian Glow Matronly Docent Quickshadow Rocket Plume Solus Prime Strongarm Tempest Spin Thunderclap Upkeep Windblade Airachnid Astraea Aurora Speeder Balewing Coldstar Crimson Phantom Cyberwarp Cyclone Dancer Diabla Duststorm Fallen Angel Filch Flamewar Flash Runner Glowstrike Hoverbolt Helter-Skelter Hurricane Hunter Ida Lensflare Metal Thunder Nebula Ripper Night Dancer Overhead Retrofit Rollcage Scatterspike Skyjack Slink Slipstream Spiral Zealot Supernova Flame Variable Star Void Pulse Zizza Ser-Ket Ripclaw Azimuth Cogwheel Elita One Mercury Moonracer Nightra Override Bot Shots (Numbers indicate order of appearance.) Buzzclaw (1) Kre-O (Numbers indicate order of appearance.) Chromia (1) Arcee (3) Strika (4) Minerva (5) Windblade (6) Paradron Medic (10) Strongarm (12) Skimmer[1] (13) Airachnid (2) Thunderblast (7) Blackarachnia (8) Slipstrike (9) Ida (11) Liftoff[1] (14) Freefall[1] (15) Angry Birds Transformers (Numbers indicate order of appearance.) Stella as:Arcee
(1) Airachnid (2) Chromia (4) Novastar (10) Moonracer (11) Greenlight (12) Silver as:Windblade (3) Energon Windblade (5) Elita-One (8) Matilda as:Energon Nautica (6) Nautica (7) Strongarm (9) Zeta as:Nightbird (13) Rosanna (15) Zeta as:Slipstream (14) Cyberverse (Numbers indicate order of appearance.) Arcee Chromia Clobber Jazz[3] Windblade Alpha Strike Nova Storm Shadow Striker Skywarp Slipstream Blackarachnia Cosmos Operatus Solus Prime Half-qualifiers: In the Japanese dub of Cyberverse, Thrust was female, and went by the name Red Wing. Acid Storm fluctuates between the male and female Seeker body types in show. Mae Catt would explain this on Twitter as this being "just something Acid Storm likes to do" and that pronouns are "up to Acid Storm". This would imply Acid Storm is non-binary gender fluid, thus they semi-qualify for the list. BotBots (Numbers indicate order of appearance.) Aday Angry Cheese Arctic Guzzlerush Bankshot Big Cantuna Bok Bok Bok-O Bonz-Eye Bot-T-Builder Bottocorrect Bratworst Brock Head Chef Nada Clawsome Crabby Grabby Cuddletooth Dingledeedoo Disaster Master Disgusto Desserto DJ Fudgey Fresh Doctor Flicker Drama Sauce Drillit Yaself Face Ace Fail Polish Fit Ness Monster Flare Devil Flood Jug Fomo Frohawk Frostfetti Frostyface Glam Glare Fancy Flare Glitch Face Goggly Spy P.I. Gold Dexter Goldface Goldiebites Goldie Terrortwirl Goldito Favrito Goldpin Baller Gold Punch Grampiano Grandma Crinkles Grave Rave The Great Mumbo Bumblo Greeny Rex Grrr'illa Grimes Halloween Knight Handy Dandy Hashtagz Hawt Diggity Hawt Mess Highroller Hiptoast Ice Sight Javasaurus Rex Jet Setter Knotzel Latte Spice Whirl Leafmeat Alone Loadoutsky Lolly Licks Lolly Mints Miss Mixed Movie Munchster Ms. Take Must Turd Nanny McBag Nomaste Nope Soap Ol' Tic Toc Ollie Bite Outta Order Overpack Pop N. Lock Pop O' Gold Pressure Punk Professor Scope Rebugnant Roarista Sandy Shades Scribby Sheriff Sugarfeet Shifty Gifty Sippyberry Sippy Slurps Skippy Dippy Disc Slappyhappy Smooth Shaker Smore N' More Sour Wing Starscope Sticky McGee Sugar Saddle Super Bubs Sweet Cheat Technotic Sonic Terror Tale Torch Tidy Trunksky Tricitrustops Tropic Guzzlerush Tutu Puffz Twerple Burple Unilla Icequeencone Venus Frogtrap Vigitente Waddlepop Wasabi Breath Whirlderful Whoopsie Cushion Wristocrat
33 notes
·
View notes
Note
Different anon than before, but since Shellshock has been brought up I may as well ask- is chapter 66 the last chapter written? It appears to have been made in 2018 but I can't find any further chapters? Sorry I'm just confuzzled! On that note I adore Shellshock and Captain Polaris both, and ngl you sold me on Ratchet x Azimuth
Hi there! 🤗
No, Chapter 66 isn't the last one written. I think we have material for 3 more chapters - though we haven't finished the story itself. I think one or two more would have to be added on top of that.
We are currently rewriting chapter 67 as some parts of it definitely are no longer suitable for our standards in 2020 - given that it was written, what, in 2014? - so that you can have an enjoyable reading experience 😜 as a teaser for the content, just enjoy the chapter cover for now!
Oh and: THANKS SO MUCH FOR SUPPORTING BOTH SS AND CAPTAIN POLARIS!!! 😭😭😭 this means a lot to me that you enjoy both works!!!

9 notes
·
View notes
Text
0 notes
Link
ABSTRACT
Despite great progress in neuroscience, there are still fundamental unanswered questions about the brain, including the origin of subjective experience and consciousness. Some answers might rely on new physical mechanisms. Given that biophotons have been discovered in the brain, it is interesting to explore if neurons use photonic communication in addition to the well-studied electro-chemical signals. Such photonic communication in the brain would require waveguides. Here we review recent work [S. Kumar, K. Boone, J. Tuszynski, P. Barclay, and C. Simon, Scientific Reports 6, 36508 (2016)] suggesting that myelinated axons could serve as photonic waveguides. The light transmission in the myelinated axon was modeled, taking into account its realistic imperfections, and experiments were proposed both in vivo and in vitro to test this hypothesis. Potential implications for quantum biology are discussed.
INTRODUCTION
Over the past decades a substantial number of facts has been discovered in the field of brain research. However, the fundamental question of how neurons, or more specifically all particles involved in the biological processes in the brain, contribute to mental abilities such as consciousness is still unanswered. The true explanation to this question might rely on physical processes other than those that have been discovered so far. One interesting candidate to focus on is biophotons, which might serve as supplementary information carriers in the brain in addition to the well established electro-chemical signals. Biophotons – which are photons ranging from near-IR to near-UV frequency and emitted without any enhancement or excitation– have been observed in many organisms such as bacteria (1), fungi (2), germinating seeds (3), plants (4), animal tissue 1 arXiv:1708.08887v1 [physics.bio-ph] 23 Aug 2017 Are there optical communication channels in the brain? cultures (5), and different parts of the human body (6–9), including the brain (10–15). These biophotons are produced by the decay of electronically excited species which are created chemically during oxidative metabolic processes (16, 17) and can contribute to communication between cells (18). Moreover, several experimental studies show the effects of light on neurons’ and, generally, the brain’s function (19–21). The existence of biophotons and their possible effects on the the brain along with the fact that photons are convenient carriers of information raises the question whether there could be optical communication in the brain. For the sources and detectors of the optical communication process in the brain, mitochondrial respiration (22, 23) or lipid oxidation (24), and centrosomes (25) or chromophores in the mitochondria (26) have been proposed, respectively. It has also been observed that opsins, photoreceptor protein molecules, exist in the brains of birds (27, 28), mammals (29–32), and more general vertebrates (33) and even in other parts of their bodies (34, 35) as well. Another essential element for this optical communication, which is not well established yet, is the existence of physical links to connect all of these spatially separated agents in a selective way. In the dense and (seemingly) disordered environment of the brain, waveguide channels for traveling photons would be the only viable way to achieve the targeted optical communication processes. Mitochondria and microtubules in neurons have been introduced as the candidates for such waveguides (36–39). However, they are not suitable in reality due to their small and inhomogeneous structure for light guidance over proper distances in the brain. Ref. (40) proposed myelinated axons as potential biophoton waveguides in the brain. The proposal is supported by a theoretical model and numerical results taking into account real imperfections. Myelin sheath (formed in the central nervous system by a kind of glia cell called oligodendrocyte) is a lamellar structure surrounding the axon and has a higher refractive index (41) than both the inside of the axon and the interstitial fluid outside (see Fig. 1a) which let the myelin sheath to guide the light inside itself for optical communications. This compact sheath also increases the propagation speed of an action potential (via saltatory conduction) based on its insulating property (42). There has been a few indirect experimental evidence for light conduction by axons (12, 43, 44). Another related and interesting experiment has shown that a certain type of glia cells, known as Muller cells, ¨ guide light in mammalian eyes (45, 46). Ref. (40) also proposed experiments to test the existence of the optical waveguides in the brain. One interesting property of optical communication channels is that they can also transmit quantum information. Quantum effects in biological systems are being studied in different areas such as photosynthesis (47, 48), avian magnetoreception (49, 50), and olfaction (51, 52). There is an increasing number of conjectures about the role of quintessential quantum features such as superposition and entanglement (53) in the brain (15, 38, 54–56). The greatest challenge when considering quantum effects in the brain or any biological system in general is environmentally induced decoherence (57), which leads to the suppression of these quantum phenomena. However, some biological processes can be fast and may show quantum features before they are destroyed by the environment. Moreover, nuclear spins can have coherence times of tens of milliseconds in the brain (58, 59). A recent proposal on “quantum cognition” suggests even longer coherence times of nuclear spins (56), but relies on quantum information transmission via molecule transport, which is very slow. In contrast, photons are the fastest and most robust carriers for quantum information over long distances, which is why currently man-made quantum networks rely on optical communication channels (typically optical fibers) between spins (60, 61).
Results
To show that myelinated axons could serve as the waveguides for traveling biophotons in the brain, Ref. (40) solved the three dimensional electromagnetic field equations numerically in different conditions, using Lumerical’s software packages FDTD (Finite Difference Time Domain) Solutions and MODE Solutions. These software packages solve Maxwell’s equations numerically, allowing the optical properties of dielectric structures defined over a mesh with subwavelength resolution to be simulated. The refractive indices of the fluid outside of the axon, the axon, and the myelin sheath were taken close to 1.34, 1.38 and 1.44 respectively (see Fig. 1a), which are consistent with their typical values (41, 62, 63). These indexes let the myelin sheath guide the light inside itself. The ratio of the radius of the axon, r to the outer radius of the myelin sheath r 0 (g-ratio) is taken equal to 0.6 for the most of the simulations, close to the experimental values (64). In reality, the radius of the myelinated axons in the brain changes from 0.2 microns to close to 10 microns (65). For the purpose of guiding light inside the myelin sheath, Ref. (40) considered the wavelength of the observed biophotons in the brain which is from 200 nm to 1300 nm. Since several proteins in the environment of the axons strongly absorb at wavelengths close to 300nm, a wavelength range of the transmitted light from the shortest permissible wavelength, λmin = 400nm, to the longest one, λmax, was chosen to avoid the absorption and confine the light well in the myelin sheath. λmax is chosen to the upper bound of the observed biophoton wavelength (1300 nm) or the thickness of the myelin sheath (denoted by d), whichever is smaller. Besides λmin and λmax, an intermediate wavelength was considered, denoted by λint , corresponding to the central permissible frequency (mid-frequency of the permissible frequency range) in the simulations. In the following section we discuss the guided modes in the myelinated axons and their transmissions in nodal and paranodal regions and even in the presence of the imperfections such as bends, varying cross-sections, and non-circular cross-sections.
Optical transmission in myelinated axons
Within the neuron, one can identify numerous intra-cellular structures that can function as potential scatterers, i.e. sources of waveguide loss. They are located both inside the axon and outside of the axon. Intra-cellular structures include cell organelles, for example, mitochondria, the endoplasmic reticulum, lipid vesicles, as well as the many filaments of the cytoskeleton, namely microtubules, microfilaments and neurofilaments. Extra-cellular structures include microglia, and astrocytes. However, the electromagnetic modes which are spatially confined within the myelin sheath, should not be affected by the presence of these structures. These biophoton modes considered here would be able to propagate in a biological waveguide provided its dimension is close to or larger than the wavelength of the light. Fig. 1b shows the numerically calculated magnitude of the electric field of a cylindrically symmetric eigenmode of an axon with radius r = 3µm and myelin sheath radius r 0 = 5µm for the wavelength 0.612µm. This electric field is azimuthally polarized as depicted is Fig. 1c and it is similar to the TE01 mode of a conventional fiber (66) which has higher refractive index of the core than that of the cladding. It is important to note that azimuthal polarization would prevent modal dispersion in the birefringent myelin sheath. Importantly, its optical axes are oriented radially (67). It can be readily established that there are hundreds of potential guided modes allowed to exist given the thickness of myelin sheath. Consequently, biophotons that could be generated by a source in the axons (e.g. mitochondria or recombination of reactive oxygen species) could readily interact with these modes as determined by mode-specific coupling coefficients. While we lack detailed knowledge of the particulars for these interactions, for the sake of simplicity and ease of illustration we select a single mode and examine its transmission. It is interesting to analyze transmission in the presence of optical imperfections such as discontinuities, bends and varying cross-sectional diameters. In this connection, we simulated short axonal segments due to computational limitations and extrapolated the results for the full length of an axon.
Transmission in nodal and paranodal regions
A myelinated axon has periodically unmyelinated segments, called Nodes of Ranvier, which are approximatly 1µm long (68) (while the whole axon length varies from 1 mm to the order of a meter). Here, we discuss the transmission in the Ranvier nodes and at the edges of the nodes, the paranodes. The configuration of myelin sheath is special in the paranodal regions (see Fig. 2a). There are many layers making up the compact myelin sheath and at the edge of each node, almost all of the layers are in contact with the core (bared axon) with a small pocket of cytoplasm. That’s because each layer moving from the innermost outward is longer than the one below. However, for thick myelin sheaths, many cytoplasmic pockets cannot reach the surface of the bare axon, but end on inner layers. Thus, the length of paranodal regions is dependent on the thickness of the myelin sheath. We call the ratio of the length of paranode, lparanode, to the thickness of the myelin sheat, d, p-ratio and take its value close to 5 in our simulations based on the realistic values (69). Fig. 2a displays the model of Ref. (40) for two adjacent paranodal regions with the node in between, and Fig. 2b shows the magnitude of the electric field profile in the longitudinal direction (along the length of the axon), EFPL, as a cylindrically symmetric input mode crosses this region. Fig. 2c shows the power transmission in the guided modes as a function of p-ratio for three wavelengths, 0.40 µm, 0.61 µm, and 1.30 µm. For the transmission, there are two main losses: divergence or scattering of the light beam. Shorter wavelengths scatter more but diverge less. Thus, in Fig. 2c, for small p-ratios, shorter wavelengths have higher transmission and as the effect of divergence is dominant in this region and the shorter wavelengths diverge less. However, for the large p-ratios, the effect of scattering is dominant and since the higher wavelengths scatter less, and have a higher transmission. Fig. 2d–f compares the transmission percentage for different axon radii, wavelengths, and p–ratios. Although in Fig. 2d, the behavior of the transmission as a fuction of axon radius is independent of p–ratios for the longest permissible wavelength, it can be concluded that for the most loosely confined modes (λmax) transmission increases in thicker axons. It’s also possible that for long wavelengths, a fraction of the light diverging into the axon comes back into the myelin sheath at the end of the paranodal region and not all the light that diverges is lost. This can be an explanation for not well-defined dependency of the transmission on the paranodal lengths (see Fig. 2d). In, Fig. 2e, and Fig. 2f, for p-ratio = 2.5, based on our intuition from Fig. 2c, the divergence is dominant. Here, the thickness of the axon plays a role in the transmission such that the thicker the axon the divergence is less and the light is transmitted more. However, for larger p–ratios, the scattering is dominant and the light scatters more in thick axons. To summarize, for small p–ratios (∼2.5), the well confined modes (shorter wavelengths) transmit better while for large p–ratios (∼5 or greater), the loosely confined ones (longer wavelengths) transmit better. Thicker axons yield higher transmission for all wavelengths with small p–ratios while it’s inverse only for the shorter wavelengths with large p–ratios. The transmission after several paranodal regions can be roughly estimated by following the intuition of exponentiating the transmission through one (see Supplementary Information of Ref (40))...
Discussion
In this review of Ref. (40) we have discussed how light conduction in a myelinated axon is feasible even in the presence of realistic imperfections in the neuron. We have also described future experiments that could validate or falsify this model of biophoton transmission (40). It is also worth addressing a few related questions. It is of interest to identify possible interaction mechanisms between biophotons and nuclear spins within the framework of quantum communication. Spin chemistry research (87) determined effects whereby electron and nuclear spins affect chemical reactions. These effects can also involve photons. In particular, a class of cryptochrome proteins can be photo-activated resulting in the production of a pair of radicals per event, with correlated electronic spins. This effect has been hypothesized to explain bird magnetoreception (49). It has been recently shown by theoretical considerations that interactions between electron and nuclear spins in cryptochromes are of critical importance to the elucidation of the precision of magnetoreception effects (50). Importantly for this topic, cryptochrome complexes are found in the eyes of mammals and they are also magnetosensitive at the molecular level (88). Therefore, if similar proteins can be found in the inner regions of the human brain, this could provide the required interface between biophotons and nuclear spins. However, for individual quantum communication links to form a larger quantum network with an associated entanglement process involving many distant spins, the nuclear spins interfacing with different axons must interact coherently. This, most likely, requires close enough contact between the interacting spins. The involvement of synaptic junctions between individual axons may provide such a proximity mechanism. We should also address the question of the potential relevance of optical communication between neurons with respect to consciousness and the binding problem. A specific anatomical question that arises is whether brain regions implicated in consciousness (89) (e.g. claustrum (90, 91), the thalamus, hypothalamus and amygdala (92), or the posterior cerebral cortex (89)) have myelinated axons with sufficient diameter to allow light transmission. A major role of the myelin sheath as an optical waveguide could provide a better understanding of the causes of the various diseases associated with it (e.g. multiple sclerosis (93)) and hence lead to a design and implementation of novel therapies for these pathologies. Let us note that, following Ref. (40), we have focused our discussion here on guidance by myelinated axons. However, light guidance by unmyelinated axons is also a possibility, as discussed in more detail in the supplementary information of Ref. (40). Finally, with the advantages optical communication provides in terms of precision and speed, it is indeed a wonder why biological evolution would not fully exploit this modality. On the other hand, if optical communication involving axons is harnessed by the brain, this would reveal a remarkable, hitherto unknown new aspect of the brains functioning, with potential impacts on unraveling fundamental issues of neuroscience.
Source: https://arxiv.org/pdf/1708.08887.pdf
#biophotons#brain waves#waveguide#myelinated axon#Neuroscience#quantum physics#quantum consciousness#wave guide#axons#quantum computing#quantum biology#science#biology#consciousness#light#enlightenment#gnosis#Alchemy#superposition#entanglement
8 notes
·
View notes
Photo
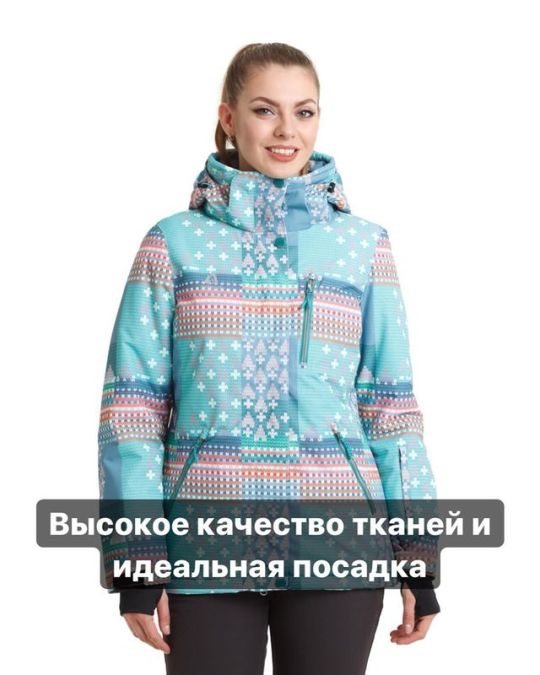
- Женская куртка В8996_66 - Цена и размеры: azimuthsport.ru/view_goods/zhenskaya-kurtka-azimuth-b-8996-66-myatnyj-pid-209502 ______________________________________________________ • Официальный лицензиат бренда Azimuth. • Сертифицированные товары. • Доставка по Москве и МО. • Отправка заказов по СНГ. • Гарантия на товары 30 дней(с момента получения заказа). • Приглашаем партнеров к оптовому сотрудничеству. ______________________________________________________ #azimuthsport #azimuth_official #azimuth #горнолыжнаякуртка #горнолыжнаяодежда #горнолыжка #лыжныекуртки #лыжнаяэкипировка (at Спуск) https://www.instagram.com/p/B2vf1iXjbT2/?igshid=174yfl1wx0z9y
#azimuthsport#azimuth_official#azimuth#горнолыжнаякуртка#горнолыжнаяодежда#горнолыжка#лыжныекуртки#лыжнаяэкипировка
0 notes
Text
I was tagged by @fryferbfringefan44. Now, I have to post 10 characters from 10 fandoms. I’m gonna take some liberties here and bend the rules by not necessarily picking top faves, but faves nonetheless and characters I want to talk about that I don’t really get to in other memes. Be ready, I’m gonna use this to let off some steam. :V
1. Isabella Garcia-Shapiro (Phineas and Ferb): I can’t help but feel controversial here because while I’d hardly call her unpopular, I always get the feeling that most people either don’t care about her much or that the main reason they like her is because they ship her with Phineas (or Ferb, or some other character even). Meanwhile I’m sitting here cringing at my old Phinabella days, and am in that odd sliver that seems to really like her but don’t really focus too much on the Phineas aspect, even if I still have some dreaded Phinabella inside me I’m trying to suppress? I mean, I didn’t even realise she had a crush on Phineas until a year after I discovered the show (yep, I didn’t see crush episodes like how Linda never sees Phineas and Ferb’s inventions).
So anyway, I just think she’s really damn cool. She’s hypercompetent like the rest of her peers, she cares about things that matter (in particular the Fireside Girls) as well as her friends, she’s not afraid to speak her mind (well, besides one thing), plus she’s funny, cute and while probably being the most “normal” out of Phineas and Ferb’s group of friends can still have her moments of quirkiness (just watch Return Policy or Face Your Fear, lol). I also find some of her flaws quite interesting, like a lot of her friends we actually see she cares enough about the Fireside Girls to the point where it has given her anxiety over potential failure, and sometimes she has a need for attention (I really like the episode where she’s competing with Candace over attention for Melissa the young Fireside Girl because of this).
Granted her central character arc still revolves around Phineas and I understand why some don’t really care for that, but admittedly I like that kind of stuff too (in b4 “problematic fave” comments from people). On one hand I feel like we focused only on her crush at specific times and not nearly as much as some people make it out to be, but on the other hand her crush on Phineas is just super adorable? I think it might actually be because I kind of relate to her (I often remind myself of her at times admittedly, even if there’s other characters I’m more like XD), like there’s loads of characters that exist as love interests but Isabella actually managed to engage me probably because we actually followed her and her feelings instead of her just being some random girl for Phineas to try and impress (I guess I’m saying she was at least active in her own romance storyline, before then I had only really seen boys chasing after girls)?
IDK if I’m making sense, but I guess I’m saying even if I think she’s able to stand on her own with her other attributes and is admirable in that regard I can’t help but really relate to the crush stuff too, which is maybe why I like her more than some people (and again, still not in the super shippy wants-her-to-be-with-Phineas-at-all-costs way). But yeah, as you can see I think Isabella is awesome and she’ll always have a special spot as a fave.
2. Jasper (Steven Universe): I choose Jasper because I feel like some people are being somewhat unfair on her? Like, I feel like some people are underestimating how complex she is and that she’s not going to be the “true villain.” Steven Universe never works that way, not even with characters like the Diamonds, you can even ask the writers and they’ll say they don’t do actual villains. Plus, lots of people have gone “true villain” on characters like Peridot when she first appeared, and now look at where she is!
Anyway, Jasper’s story is honestly really gripping and also quite tragic. Sure, she works as a great antagonist against the Crystal Gems, but when we piece together where she came from we really get to see why she is the way she is, and she’s actually quite sympathetic. I mean, in her last appearance in Earthlings, I was on the verge of tears. She’s not just some thug, she has things she cares about and has experienced real hurt, and has become quite messed up as a result.
Oh, and I can’t wait for her to come back. She’s gotta be back eventually.
3. CT-5555, aka “Fives” (Star Wars): I always enjoyed the clone troopers, but one of my favourites was always Fives. I was always invested in the Domino Squad storyline, and how they rose through the ranks and eventually became ARC Troopers. However, when things got really interesting for me was the Umbara story arc.
Here, we not only saw Fives’ capabilities as a soldier, but with Pong Krell taking control of the 501st Legion he actually started to show more colours to his personality. In particular, we got to see that he cared more about what he thought was right than simply following orders without question.
Unfortunately, even if that saved him and his fellow clones on Umbara, it would doom him when he learned about Order 66. Fives may have done the right thing, but when the entire Republic is against you for trying to reveal what they perceive as some conspiracy theory, you’re not going to go out well (especially if you have the Sith involved). I just really liked seeing a clone grow rebellious and then renegade but still cared about his duty because it’s either all loyalty or fuck the army, it was a nice balance. It was just committing the crime of asking questions that doomed him (and gosh his death is so sad).
At least Rex seemed to listen to his warning though. :’)
4. Bradley Nicholson (Milo Murphy’s Law): IDK if I’ve talked about Bradley much, but he’s just such a blast to watch. Of course there’s the added bonus of Vincent Martella voicing a character radically different from Phineas, but even then he’s just really funny, the voice acting just enhances that. He’s also quite interesting, given that he’s jealous of Milo and the attention he gets, plus he seems kind of lonely. I really want to see him interact with Milo in the future and see whether he changes his opinion on him, or if he somehow grows even more envious while he grows on the others.
5. Makuta Teridax (Bionicle): Yeah, Teridax here is a pretty standard villain with standard villain traits. Selfish, arrogant, wants power, views his subordinates as nothing but tools, associated with darkness, etc. The reason he has left a mark on me is because he’s not only good at what he does, he’s epic at it.
They could’ve just had him be some typical dark lord type, but he ended up developing into a character that is able to plan things out to a ridiculous extent. As a result, he would always find ways to be steps ahead of the heroes, and he would even go as far as letting himself be severely defeated and letting them win if it meant achieving his ultimate endgame. Everyone was being played like a puppet, he was powerful but his manipulation and planning is what made him so competent. Oh yeah, and he ended up winning. It literally took a moon to the head to finally take him down, but even then he had already unleashed so much terror on the world that was now his.
6. Keith (Voltron: Legendary Defender): I’m pretty new to VLD so I might not really be as in-depth here now, but Keith is definitely one of my favourite characters in the show. For starters, he’s just really badass. Seriously, he might be reckless at times, but at least he’s not to the point of being foolish, he’s really good at what he does. Also the whole storyline with him being Galra was really interesting, The Blade of Marmora is probably one of my favourite episodes of the show so far. I was already invested in his need for answers, but there he was willing to go to dangerous lengths to get what he wanted. At least the hell he went through was worth it.
7. Alister Azimuth (Ratchet and Clank): Most of the final bosses in Ratchet and Clank games are villains, but here it was literally the mentor character for Ratchet. Granted I’ve never been too savvy with video games, but this twist here when I first saw A Crack in Time blew me away. He’s one of the last of his entire species and has lost everyone who was ever close to him, but when he sees the chance to go back in time, he can’t help but take it. Problem is that he will rip apart time if he actually tries that. It’s actually really dramatic to fight him at the end because throughout the entire game Azimuth had been helping out Ratchet despite stuff from his past slipping into the open (oh yeah, he also feels personally responsible for unwitting helping the one to get rid of the Lombaxes), but when Ratchet and Clank tell him using The Great Clock to alter time would be dangerous, he decides to stop playing nice. He’s rough throughout the entire game, but now he’s not taking anything from anyone. He needed to go back and undo the mistakes of the past, but he had to end up fighting someone who is the son of his once best friend to do it. Granted he’s brought to his senses by the end, but he does end up dying to reverse the time travel process.
8. Connor Temple (Primeval): I don’t remember much of Primeval, but I always liked Connor. Sure, a lot of the time he was there to be goofy and provide comic relief, but he was also really intelligent and knew his stuff. It’s also cool seeing him grow more important with each series, even if in the end his technological skills almost fuck up the Earth since he was being played by the antagonists. Just a fun and cool character.
9. Max Jerry Horowitz (Mary and Max): Mary and Max isn’t a film for the faint of heart (...like me), but Max has always meant a lot to me. He was the first time I had ever seen an Autistic character that felt real, and not just some stereotype or gag. We get to know him and all of the stuff he’s been through, and you can’t help but feel for the guy. He also wasn’t afraid to be himself despite how much hell the world put him through, which is really great to see. Also yay for a character that actually supports neurodiversity in some shape or form!
10. Donna Noble (Doctor Who): Donna was the first companion I got to know on Doctor Who, and she’s still my favourite. I enjoyed seeing someone with a relationship with the Doctor that was platonic but still strong and obviously meant as much as any other kind of relationship, and she was a lot of fun. I understand some found her annoying at first, but if she didn’t start there she wouldn’t have had such great character growth, learning to grow more confident in herself and overcome her insecurities. She was really funny as well, not to mention unafraid to speak up about things. The way she left the show was absolutely heartbreaking though...
I’m not tagging anyone, but if you’re reading this an interested feel free to do this.
#ask#meme#long post#Phineas and Ferb#steven universe#star wars#milo murphy's law#bionicle#voltron: legendary defender#ratchet and clank#primeval#mary and max#doctor who
25 notes
·
View notes
Text
Solution Manual for Elementary Surveying An Introduction to Geomatics 13th Edition by Ghilani Wolf
This is Full Solution Manual for Elementary Surveying: An Introduction to Geomatics, 13th Edition Charles D. Ghilani and Wolf
Click link bellow to view sample:
http://digitalcontentmarket.org/wp-content/uploads/2017/01/Solution-Manual-for-Elementary-Surveying-An-Introduction-to-Geomatics-13th-Edition-Charles-D-Ghilani.pdf
Origin Book information:
ISBN-10: 0132554348
ISBN-13: 978-0132554343 9780132554343
Full download link: Solution Manual for Elementary Surveying An Introduction to Geomatics 13th Edition by Ghilani Wolf
http://digitalcontentmarket.org/download/solution-manual-for-elementary-surveying-an-introduction-to-geomatics-13th-edition-charles-d-ghilani
You will be guided to the product download page immediately once you complete the payment.If you have any questions, or would like a receive a sample chapter before your purchase, please contact us via email :
Table of Contents
1 • INTRODUCTION 1
1.1 Definition of Surveying 1
1.2 Geomatics 3
1.3 History of Surveying 4
1.4 Geodetic and Plane Surveys 9
1.5 Importance of Surveying 10
1.6 Specialized Types of Surveys 11
1.7 Surveying Safety 13
1.8 Land and Geographic Information Systems 14
1.9 Federal Surveying and Mapping Agencies 15
1.10 The Surveying Profession 16
1.11 Professional Surveying Organizations 17
1.12 Surveying on the Internet 18
1.13 Future Challenges in Surveying 19
Problems 20
Bibliography 21
2 • UNITS, SIGNIFICANT FIGURES, AND FIELD NOTES 23
PART I UNITS AND SIGNIFICANT FIGURES 23
2.1 Introduction 23
2.2 Units of Measurement 23
2.3 International System of Units (SI) 25
2.4 Significant Figures 27
2.5 Rounding Off Numbers 29
PART II FIELD NOTES 30
2.6 Field Notes 30
2.7 General Requirements of Handwritten Field Notes 31
2.8 Types of Field Books 32
2.9 Kinds of Notes 33
2.10 Arrangements of Notes 33
2.11 Suggestions for Recording Notes 35
2.12 Introduction to Data Collectors 36
2.13 Transfer of Files from Data Collectors 39
2.14 Digital Data File Management 41
2.15 Advantages and Disadvantages of Data Collectors 42
Problems 43
Bibliography 44
3 • THEORY OF ERRORS IN OBSERVATIONS 45
3.1 Introduction 45
3.2 Direct and Indirect Observations 45
3.3 Errors in Measurements 46
3.4 Mistakes 46
3.5 Sources of Errors in Making Observations 47
3.6 Types of Errors 47
3.7 Precision and Accuracy 48
3.8 Eliminating Mistakes and Systematic Errors 49
3.9 Probability 49
3.10 Most Probable Value 50
3.11 Residuals 51
3.12 Occurrence of Random Errors 51
3.13 General Laws of Probability 55
3.14 Measures of Precision 55
3.15 Interpretation of Standard Deviation 58
3.16 The 50, 90, and 95 Percent Errors 58
3.17 Error Propagation 60
3.18 Applications 65
3.19 Conditional Adjustment of Observations 65
3.20 Weights of Observations 66
3.21 Least-Squares Adjustment 67
3.22 Using Software 68
Problems 69
Bibliography 71
4 • LEVELING–THEORY, METHODS, AND EQUIPMENT 73
PART I LEVELING–THEORY AND METHODS 73
4.1 Introduction 73
4.2 Definitions 73
4.3 North American Vertical Datum 75
4.4 Curvature and Refraction 76
4.5 Methods for Determining Differences in Elevation 78
PART II EQUIPMENT FOR DIFFERENTIAL LEVELING 85
4.6 Categories of Levels 85
4.7 Telescopes 86
4.8 Level Vials 87
4.9 Tilting Levels 89
4.10 Automatic Levels 90
4.11 Digital Levels 91
4.12 Tripods 93
4.13 Hand Level 93
4.14 Level Rods 94
4.15 Testing and Adjusting Levels 96
Problems 100
Bibliography 102
5 • LEVELING–FIELD PROCEDURES AND COMPUTATIONS 103
5.1 Introduction 103
5.2 Carrying and Setting Up a Level 103
5.3 Duties of a Rodperson 105
5.4 Differential Leveling 106
5.5 Precision 112
5.6 Adjustments of Simple Level Circuits 113
5.7 Reciprocal Leveling 114
5.8 Three-Wire Leveling 115
5.9 Profile Leveling 117
5.10 Grid, Cross-Section, or Borrow-Pit Leveling 121
5.11 Use of the Hand Level 122
5.12 Sources of Error in Leveling 122
5.13 Mistakes 124
5.14 Reducing Errors and Eliminating Mistakes 125
5.15 Using Software 125
Problems 127
Bibliography 129
6 • DISTANCE MEASUREMENT 131
PART I METHODS FOR MEASURING DISTANCES 131
6.1 Introduction 131
6.2 Summary of Methods for Making Linear Measurements 131
6.3 Pacing 132
6.4 Odometer Readings 132
6.5 Optical Rangefinders 133
6.6 Tacheometry 133
6.7 Subtense Bar 133
PART II DISTANCE MEASUREMENTS BY TAPING 133
6.8 Introduction to Taping 133
6.9 Taping Equipment and Accessories 134
6.10 Care of Taping Equipment 135
6.11 Taping on Level Ground 136
6.12 Horizontal Measurements on Sloping Ground 138
6.13 Slope Measurements 140
6.14 Sources of Error in Taping 141
6.15 Tape Problems 145
6.16 Combined Corrections in a Taping Problem 147
PART III ELECTRONIC DISTANCE MEASUREMENT 148
6.17 Introduction 148
6.18 Propagation of Electromagnetic Energy 149
6.19 Principles of Electronic Distance Measurement 152
6.20 Electro-Optical Instruments 153
6.21 Total Station Instruments 156
6.22 EDM Instruments Without Reflectors 157
6.23 Computing Horizontal Lengths from Slope Distances 158
6.24 Errors in Electronic Distance Measurement 160
6.25 Using Software 165
Problems 165
Bibliography 168
7 • ANGLES, AZIMUTHS, AND BEARINGS 169
7.1 Introduction 169
7.2 Units of Angle Measurement 169
7.3 Kinds of Horizontal Angles 170
7.4 Direction of a Line 171
7.5 Azimuths 172
7.6 Bearings 173
7.7 Comparison of Azimuths and Bearings 174
7.8 Computing Azimuths 175
7.9 Computing Bearings 177
7.10 The Compass and the Earth’s Magnetic Field 179
7.11 Magnetic Declination 180
7.12 Variations in Magnetic Declination 181
7.13 Software for Determining Magnetic Declination 183
7.14 Local Attraction 184
7.15 Typical Magnetic Declination Problems 185
7.16 Mistakes 187
Problems 187
Bibliography 189
8 • TOTAL STATION INSTRUMENTS; ANGLE OBSERVATIONS 191
PART I TOTAL STATION INSTRUMENTS 191
8.1 Introduction 191
8.2 Characteristics of Total Station Instruments 191
8.3 Functions Performed by Total Station Instruments 194
8.4 Parts of a Total Station Instrument 195
8.5 Handling and Setting Up a Total Station Instrument 199
8.6 Servo-Driven and Remotely Operated Total Station Instruments 201
PART II ANGLE OBSERVATIONS 203
8.7 Relationship of Angles and Distances 203
8.8 Observing Horizontal Angles with Total Station Instruments 204
8.9 Observing Horizontal Angles by the Direction Method 206
8.10 Closing the Horizon 207
8.11 Observing Deflection Angles 209
8.12 Observing Azimuths 211
8.13 Observing Vertical Angles 211
8.14 Sights and Marks 213
8.15 Prolonging a Straight Line 214
8.16 Balancing-In 216
8.17 Random Traverse 217
8.18 Total Stations for Determining Elevation Differences 218
8.19 Adjustment of Total Station Instruments and Their Accessories 219
8.20 Sources of Error in Total Station Work 222
8.21 Propagation of Random Errors in Angle Observations 228
8.22 Mistakes 228
Problems 229
Bibliography 230
9 • TRAVERSING 231
9.1 Introduction 231
9.2 Observation of Traverse Angles or Directions 233
9.3 Observation of Traverse Lengths 234
9.4 Selection of Traverse Stations 235
9.5 Referencing Traverse Stations 235
9.6 Traverse Field Notes 237
9.7 Angle Misclosure 238
9.8 Traversing with Total Station Instruments 239
9.9 Radial Traversing 240
9.10 Sources of Error in Traversing 241
9.11 Mistakes in Traversing 242
Problems 242
10 • TRAVERSE COMPUTATIONS 245
10.1 Introduction 245
10.2 Balancing Angles 246
10.3 Computation of Preliminary Azimuths or Bearings 248
10.4 Departures and Latitudes 249
10.5 Departure and Latitude Closure Conditions 251
10.6 Traverse Linear Misclosure and Relative Precision 251
10.7 Traverse Adjustment 252
10.8 Rectangular Coordinates 255
10.9 Alternative Methods for Making Traverse Computations 256
10.10 Inversing 260
10.11 Computing Final Adjusted Traverse Lengths and Directions 261
10.12 Coordinate Computations in Boundary Surveys 263
10.13 Use of Open Traverses 265
10.14 State Plane Coordinate Systems 268
10.15 Traverse Computations Using Computers 269
10.16 Locating Blunders in Traverse Observations 269
10.17 Mistakes in Traverse Computations 272
Problems 272
Bibliography 275
11 • COORDINATE GEOMETRY IN SURVEYING CALCULATIONS 277
11.1 Introduction 277
11.2 Coordinate Forms of Equations for Lines and Circles 278
11.3 Perpendicular Distance from a Point to a Line 280
11.4 Intersection of Two Lines, Both Having Known Directions 282
11.5 Intersection of a Line with a Circle 284
11.6 Intersection of Two Circles 287
11.7 Three-Point Resection 289
11.8 Two-Dimensional Conformal Coordinate Transformation 292
11.9 Inaccessible Point Problem 297
11.10 Three-Dimensional Two-Point Resection 299
11.11 Software 302
Problems 303
Bibliography 307
12 • AREA 309
12.1 Introduction 309
12.2 Methods of Measuring Area 309
12.3 Area by Division Into Simple Figures 310
12.4 Area by Offsets from Straight Lines 311
12.5 Area by Coordinates 313
12.6 Area by Double-Meridian Distance Method 317
12.7 Area of Parcels with Circular Boundaries 320
12.8 Partitioning of Lands 321
12.9 Area by Measurements from Maps 325
12.10 Software 327
12.11 Sources of Error in Determining Areas 328
12.12 Mistakes in Determining Areas 328
Problems 328
Bibliography 330
13 • GLOBAL NAVIGATION SATELLITE SYSTEMS—INTRODUCTION AND PRINCIPLES OF OPERATION 331
13.1 Introduction 331
13.2 Overview of GPS 332
13.3 The GPS Signal 335
13.4 Reference Coordinate Systems 337
13.5 Fundamentals of Satellite Positioning 345
13.6 Errors in Observations 348
13.7 Differential Positioning 356
13.8 Kinematic Methods 358
13.9 Relative Positioning 359
13.10 Other Satellite Navigation Systems 362
13.11 The Future 364
Problems 365
Bibliography 366
14 • GLOBAL NAVIGATION SATELLITE SYSTEMS—STATIC SURVEYS 367
14.1 Introduction 367
14.2 Field Procedures in Satellite Surveys 369
14.3 Planning Satellite Surveys 372
14.4 Performing Static Surveys 384
14.5 Data Processing and Analysis 386
14.6 Sources of Errors in Satellite Surveys 393
14.7 Mistakes in Satellite Surveys 395
Problems 395
Bibliography 397
15 • GLOBAL NAVIGATION SATELLITE SYSTEMS—KINEMATIC SURVEYS 399
15.1 Introduction 399
15.2 Planning of Kinematic Surveys 400
15.3 Initialization 402
15.4 Equipment Used in Kinematic Surveys 403
15.5 Methods Used in Kinematic Surveys 405
15.6 Performing Post-Processed Kinematic Surveys 408
15.7 Communication in Real-Time Kinematic Surveys 411
15.8 Real-Time Networks 412
15.9 Performing Real-Time Kinematic Surveys 413
15.10 Machine Control 414
15.11 Errors in Kinematic Surveys 418
15.12 Mistakes in Kinematic Surveys 418
Problems 418
Bibliography 419
16 • ADJUSTMENTS BY LEAST SQUARES 421
16.1 Introduction 421
16.2 Fundamental Condition of Least Squares 423
16.3 Least-Squares Adjustment by the Observation Equation Method 424
16.4 Matrix Methods in Least-Squares Adjustment 428
16.5 Matrix Equations for Precisions of Adjusted Quantities 430
16.6 Least-Squares Adjustment of Leveling Circuits 432
16.7 Propagation of Errors 436
16.8 Least-Squares Adjustment of GNSS Baseline Vectors 437
16.9 Least-Squares Adjustment of Conventional Horizontal Plane Surveys 443
16.10 The Error Ellipse 452
16.11 Adjustment Procedures 457
16.12 Other Measures of Precision for Horizontal Stations 458
16.13 Software 460
16.14 Conclusions 460
Problems 461
Bibliography 466
17 • MAPPING SURVEYS 467
17.1 Introduction 467
17.2 Basic Methods for Performing Mapping Surveys 468
17.3 Map Scale 468
17.4 Control for Mapping Surveys 470
17.5 Contours 471
17.6 Characteristics of Contours 474
17.7 Direct and Indirect Methods of Locating Contours 474
17.8 Digital Elevation Models and Automated Contouring Systems 477
17.9 Basic Field Methods for Locating Topographic Details 479
17.10 Three-Dimensional Conformal Coordinate Transformation 488
17.11 Selection of Field Method 489
17.12 Working with Data Collectors and Field-to-Finish Software 490
17.13 Hydrographic Surveys 493
17.14 Sources of Error in Mapping Surveys 497
17.15 Mistakes in Mapping Surveys 498
Problems 498
Bibliography 500
18 • MAPPING 503
18.1 Introduction 503
18.2 Availability of Maps and Related Information 504
18.3 National Mapping Program 505
18.4 Accuracy Standards for Mapping 505
18.5 Manual and Computer-Aided Drafting Procedures 507
18.6 Map Design 508
18.7 Map Layout 510
18.8 Basic Map Plotting Procedures 512
18.9 Contour Interval 514
18.10 Plotting Contours 514
18.11 Lettering 515
18.12 Cartographic Map Elements 516
18.13 Drafting Materials 519
18.14 Automated Mapping and Computer-Aided Drafting Systems 519
18.15 Impacts of Modern Land and Geographic Information Systems on Mapping 525
18.16 Sources of Error in Mapping 526
18.17 Mistakes in Mapping 526
Problems 526
Bibliography 528
19 • CONTROL SURVEYS AND GEODETIC REDUCTIONS 529
19.1 Introduction 529
19.2 The Ellipsoid and Geoid 530
19.3 The Conventional Terrestrial Pole 532
19.4 Geodetic Position and Ellipsoidal Radii of Curvature 534
19.5 Geoid Undulation and Deflection of the Vertical 536
19.6 U.S. Reference Frames 538
19.7 Accuracy Standards and Specifications for Control Surveys 547
19.8 The National Spatial Reference System 550
19.9 Hierarchy of the National Horizontal Control Network 550
19.10 Hierarchy of the National Vertical Control Network 551
19.11 Control Point Descriptions 551
19.12 Field Procedures for Traditional Horizontal Control Surveys 554
19.13 Field Procedures for Vertical Control Surveys 559
19.14 Reduction of Field Observations to Their Geodetic Values 564
19.15 Geodetic Position Computations 577
19.16 The Local Geodetic Coordinate System 580
19.17 Three-Dimensional Coordinate Computations 581
19.18 Software 584
Problems 584
Bibliography 587
20 • STATE PLANE COORDINATES AND OTHER MAP PROJECTIONS 589
20.1 Introduction 589
20.2 Projections Used in State Plane Coordinate Systems 590
20.3 Lambert Conformal Conic Projection 593
20.4 Transverse Mercator Projection 594
20.5 State Plane Coordinates in NAD27 and NAD83 595
20.6 Computing SPCS83 Coordinates in the Lambert Conformal Conic System 596
20.7 Computing SPCS83 Coordinates in the Transverse Mercator System 601
20.8 Reduction of Distances and Angles to State Plane Coordinate Grids 608
20.9 Computing State Plane Coordinates of Traverse Stations 617
20.10 Surveys Extending from One Zone to Another 620
20.11 Conversions Between SPCS27 and SPCS83 621
20.12 The Universal Transverse Mercator Projection 622
20.13 Other Map Projections 623
20.14 Map Projection Software 627
Problems 628
Bibliography 631
21 • BOUNDARY SURVEYS 633
21.1 Introduction 633
21.2 Categories of Land Surveys 634
21.3 Historical Perspectives 635
21.4 Property Description by Metes and Bounds 636
21.5 Property Description by Block-and-Lot System 639
21.6 Property Description by Coordinates 641
21.7 Retracement Surveys 641
21.8 Subdivision Surveys 644
21.9 Partitioning Land 646
21.10 Registration of Title 647
21.11 Adverse Possession and Easements 648
21.12 Condominium Surveys 648
21.13 Geographic and Land Information Systems 655
21.14 Sources of Error in Boundary Surveys 655
21.15 Mistakes 655
Problems 656
Bibliography 658
22 • SURVEYS OF THE PUBLIC LANDS 659
22.1 Introduction 659
22.2 Instructions for Surveys of the Public Lands 660
22.3 Initial Point 663
22.4 Principal Meridian 664
22.5 Baseline 665
22.6 Standard Parallels (Correction Lines) 666
22.7 Guide Meridians 666
22.8 Township Exteriors, Meridional (Range) Lines, and Latitudinal (Township) Lines 667
22.9 Designation of Townships 668
22.10 Subdivision of a Quadrangle into Townships 668
22.11 Subdivision of a Township into Sections 670
22.12 Subdivision of Sections 671
22.13 Fractional Sections 672
22.14 Notes 672
22.15 Outline of Subdivision Steps 672
22.16 Marking Corners 674
22.17 Witness Corners 674
22.18 Meander Corners 675
22.19 Lost and Obliterated Corners 675
22.20 Accuracy of Public Lands Surveys 678
22.21 Descriptions by Township Section and Smaller Subdivision 678
22.22 BLM Land Information System 679
22.23 Sources of Error 680
22.24 Mistakes 680
Problems 681
Bibliography 683
23 • CONSTRUCTION SURVEYS 685
23.1 Introduction 685
23.2 Specialized Equipment for Construction Surveys 686
23.3 Horizontal and Vertical Control 689
23.4 Staking Out a Pipeline 691
23.5 Staking Pipeline Grades 692
23.6 Staking Out a Building 694
23.7 Staking Out Highways 698
23.8 Other Construction Surveys 703
23.9 Construction Surveys Using Total Station Instruments 704
23.10 Construction Surveys Using GNSS Equipment 706
23.11 Machine Guidance and Control 709
23.12 As-Built Surveys with Laser Scanning 710
23.13 Sources of Error in Construction Surveys 711
23.14 Mistakes 712
Problems 712
Bibliography 714
24 • HORIZONTAL CURVES 715
24.1 Introduction 715
24.2 Degree of Circular Curve 716
24.3 Definitions and Derivation of Circular Curve Formulas 718
24.4 Circular Curve Stationing 720
24.5 General Procedure of Circular Curve Layout by Deflection Angles 721
24.6 Computing Deflection Angles and Chords 723
24.7 Notes for Circular Curve Layout by Deflection Angles and Incremental Chords 725
24.8 Detailed Procedures for Circular Curve Layout by Deflection Angles and Incremental Chords 726
24.9 Setups on Curve 727
24.10 Metric Circular Curves by Deflection Angles and Incremental Chords 728
24.11 Circular Curve Layout by Deflection Angles and Total Chords 730
24.12 Computation of Coordinates on a Circular Curve 731
24.13 Circular Curve Layout by Coordinates 733
24.14 Curve Stakeout Using GNSS Receivers and Robotic Total Stations 738
24.15 Circular Curve Layout by Offsets 739
24.16 Special Circular Curve Problems 742
24.17 Compound and Reverse Curves 743
24.18 Sight Distance on Horizontal Curves 743
24.19 Spirals 744
24.20 Computation of “As-Built” Circular Alignments 749
24.21 Sources of Error in Laying Out Circular Curves 752
24.22 Mistakes 752
Problems 753
Bibliography 755
25 • VERTICAL CURVES 757
25.1 Introduction 757
25.2 General Equation of a Vertical Parabolic Curve 758
25.3 Equation of an Equal Tangent Vertical Parabolic Curve 759
25.4 High or Low Point on a Vertical Curve 761
25.5 Vertical Curve Computations Using the Tangent Offset Equation 761
25.6 Equal Tangent Property of a Parabola 765
25.7 Curve Computations by Proportion 766
25.8 Staking a Vertical Parabolic Curve 766
25.9 Machine Control in Grading Operations 767
25.10 Computations for an Unequal Tangent Vertical Curve 767
25.11 Designing a Curve to Pass Through a Fixed Point 770
25.12 Sight Distance 771
25.13 Sources of Error in Laying Out Vertical Curves 773
25.14 Mistakes 774
Problems 774
Bibliography 776
26 • VOLUMES 777
26.1 Introduction 777
26.2 Methods of Volume Measurement 777
26.3 The Cross-Section Method 778
26.4 Types of Cross Sections 779
26.5 Average-End-Area Formula 780
26.6 Determining End Areas 781
26.7 Computing Slope Intercepts 784
26.8 Prismoidal Formula 786
26.9 Volume Computations 788
26.10 Unit-Area, or Borrow-Pit, Method 790
26.11 Contour-Area Method 791
26.12 Measuring Volumes of Water Discharge 793
26.13 Software 794
26.14 Sources of Error in Determining Volumes 795
26.15 Mistakes 795
Problems 795
Bibliography 798
27 • PHOTOGRAMMETRY 799
27.1 Introduction 799
27.2 Uses of Photogrammetry 800
27.3 Aerial Cameras 801
27.4 Types of Aerial Photographs 803
27.5 Vertical Aerial Photographs 804
27.6 Scale of a Vertical Photograph 806
27.7 Ground Coordinates from a Single Vertical Photograph 810
27.8 Relief Displacement on a Vertical Photograph 811
27.9 Flying Height of a Vertical Photograph 813
27.10 Stereoscopic Parallax 814
27.11 Stereoscopic Viewing 817
27.12 Stereoscopic Measurement of Parallax 819
27.13 Analytical Photogrammetry 820
27.14 Stereoscopic Plotting Instruments 821
27.15 Orthophotos 826
27.16 Ground Control for Photogrammetry 827
27.17 Flight Planning 828
27.18 Airborne Laser-Mapping Systems 830
27.19 Remote Sensing 831
27.20 Software 837
27.21 Sources of Error in Photogrammetry 838
27.22 Mistakes 838
Problems 839
Bibliography 842
28 • INTRODUCTION TO GEOGRAPHIC INFORMATION SYSTEMS 843
28.1 Introduction 843
28.2 Land Information Systems 846
28.3 GIS Data Sources and Classifications 846
28.4 Spatial Data 846
28.5 Nonspatial Data 852
28.6 Data Format Conversions 853
28.7 Creating GIS Databases 856
28.8 Metadata 862
28.9 GIS Analytical Functions 862
28.10 GIS Applications 867
28.11 Data Sources 867
Problems 869
Bibliography 871
APPENDIX A • DUMPY LEVELS, TRANSITS, AND THEODOLITES 873
APPENDIX B • EXAMPLE NOTEFORMS 888
APPENDIX C • ASTRONOMICAL OBSERVATIONS 895
APPENDIX D • USING THE WORKSHEETS FROM THE COMPANION WEBSITE 911
APPENDIX E • INTRODUCTION TO MATRICES 917
APPENDIX F • U.S. STATE PLANE COORDINATE SYSTEM DEFINING PARAMETERS 923
APPENDIX G • ANSWERS TO SELECTED PROBLEMS 927
INDEX 933
Relate keywords
elementary surveying an introduction to geomatics 13th edition solutions pdf
elementary surveying an introduction to geomatics 13th edition pdf download
elementary surveying an introduction to geomatics thirteenth edition
elementary surveying an introduction to geomatics 13th edition
elementary surveying an introduction to geomatics 13th edition answers
elementary surveying an introduction to geomatics 13th edition solutions
elementary surveying - an introduction to geomatics 13th ed
elementary surveying an introduction to geomatics 13th edition solutions manual
elementary surveying an introduction to geomatics 13th edition pdf solutions
0 notes
Video
There is Peace To Be Found Even Amongst the Raging Waters (Jasper National Park) by Mark Stevens
Via Flickr:
While at an overlook to Sunwapta Falls with a view looking upstream and to the northeast. This is located along the Icefields Parkway in Jasper National Park. With this image I wanted to capture a wide-angle view as the waters raged on by to the nearby waterfall. I liked how the river flowed around that island with the evergreen tree and decided to center that in the image. The waters would flow on by helping to almost channelized the view. I also like how the nearby mountainside and more distant ridges and peaks added a backdrop for this setting in the Canadian Rockies.
#Alberta Highway 93#Alberta and Glacier National Park#Azimuth 66#Blue Skies#Canadian Rockies#Central Front Ranges#Day 2#DxO PhotoLab 6 Edited#Endless Chain Ridge#Evergreen Trees#Evergreens#Falls#Forest#Forest Landscape#Highway 93#Hillside of Trees#Icefields Parkway#Jasper National Park#Landscape#Landscape - Scenery#Looking NE#Maligne Range#Mountain Peak#Mountains#Mountains in Distance#Mountains off in Distance#Mountainside#Nature#Nikon D850#No People
2 notes
·
View notes
Text
Solution Manual for Elementary Surveying An Introduction to Geomatics 13th Edition by Ghilani
This is Full Solution Manual for Elementary Surveying: An Introduction to Geomatics, 13th Edition Charles D. Ghilani
Click link bellow to view sample:
https://getbooksolutions.com/wp-content/uploads/2017/01/Solution-Manual-for-Elementary-Surveying-An-Introduction-to-Geomatics-13th-Edition-Charles-D-Ghilani.pdf
Origin Book information:
Charles D. Ghilani
Hardcover: 984 pages
Publisher: Prentice Hall; 13 edition (January 8, 2011)
Language: English
ISBN-10: 0132554348
ISBN-13: 978-0132554343
what is solution manual elementary surveying an introduction to geomatics 13th edition
where you can download solution manual elementary surveying an introduction to geomatics 13th edition?
and how you can get solution manual elementary surveying an introduction to geomatics 13th edition in fastest way?
You will be guided to the product download page immediately once you complete the payment. If you have any questions, or would like a receive a sample chapter before your purchase, please contact us via email :
Full download link:
https://getbooksolutions.com/download/solution-manual-for-elementary-surveying-an-introduction-to-geomatics-13th-edition-charles-d-ghilani
Table of Contents
1 • INTRODUCTION 1
1.1 Definition of Surveying 1
1.2 Geomatics 3
1.3 History of Surveying 4
1.4 Geodetic and Plane Surveys 9
1.5 Importance of Surveying 10
1.6 Specialized Types of Surveys 11
1.7 Surveying Safety 13
1.8 Land and Geographic Information Systems 14
1.9 Federal Surveying and Mapping Agencies 15
1.10 The Surveying Profession 16
1.11 Professional Surveying Organizations 17
1.12 Surveying on the Internet 18
1.13 Future Challenges in Surveying 19
Problems 20
Bibliography 21
2 • UNITS, SIGNIFICANT FIGURES, AND FIELD NOTES 23
PART I UNITS AND SIGNIFICANT FIGURES 23
2.1 Introduction 23
2.2 Units of Measurement 23
2.3 International System of Units (SI) 25
2.4 Significant Figures 27
2.5 Rounding Off Numbers 29
PART II FIELD NOTES 30
2.6 Field Notes 30
2.7 General Requirements of Handwritten Field Notes 31
2.8 Types of Field Books 32
2.9 Kinds of Notes 33
2.10 Arrangements of Notes 33
2.11 Suggestions for Recording Notes 35
2.12 Introduction to Data Collectors 36
2.13 Transfer of Files from Data Collectors 39
2.14 Digital Data File Management 41
2.15 Advantages and Disadvantages of Data Collectors 42
Problems 43
Bibliography 44
3 • THEORY OF ERRORS IN OBSERVATIONS 45
3.1 Introduction 45
3.2 Direct and Indirect Observations 45
3.3 Errors in Measurements 46
3.4 Mistakes 46
3.5 Sources of Errors in Making Observations 47
3.6 Types of Errors 47
3.7 Precision and Accuracy 48
3.8 Eliminating Mistakes and Systematic Errors 49
3.9 Probability 49
3.10 Most Probable Value 50
3.11 Residuals 51
3.12 Occurrence of Random Errors 51
3.13 General Laws of Probability 55
3.14 Measures of Precision 55
3.15 Interpretation of Standard Deviation 58
3.16 The 50, 90, and 95 Percent Errors 58
3.17 Error Propagation 60
3.18 Applications 65
3.19 Conditional Adjustment of Observations 65
3.20 Weights of Observations 66
3.21 Least-Squares Adjustment 67
3.22 Using Software 68
Problems 69
Bibliography 71
4 • LEVELING–THEORY, METHODS, AND EQUIPMENT 73
PART I LEVELING–THEORY AND METHODS 73
4.1 Introduction 73
4.2 Definitions 73
4.3 North American Vertical Datum 75
4.4 Curvature and Refraction 76
4.5 Methods for Determining Differences in Elevation 78
PART II EQUIPMENT FOR DIFFERENTIAL LEVELING 85
4.6 Categories of Levels 85
4.7 Telescopes 86
4.8 Level Vials 87
4.9 Tilting Levels 89
4.10 Automatic Levels 90
4.11 Digital Levels 91
4.12 Tripods 93
4.13 Hand Level 93
4.14 Level Rods 94
4.15 Testing and Adjusting Levels 96
Problems 100
Bibliography 102
5 • LEVELING–FIELD PROCEDURES AND COMPUTATIONS 103
5.1 Introduction 103
5.2 Carrying and Setting Up a Level 103
5.3 Duties of a Rodperson 105
5.4 Differential Leveling 106
5.5 Precision 112
5.6 Adjustments of Simple Level Circuits 113
5.7 Reciprocal Leveling 114
5.8 Three-Wire Leveling 115
5.9 Profile Leveling 117
5.10 Grid, Cross-Section, or Borrow-Pit Leveling 121
5.11 Use of the Hand Level 122
5.12 Sources of Error in Leveling 122
5.13 Mistakes 124
5.14 Reducing Errors and Eliminating Mistakes 125
5.15 Using Software 125
Problems 127
Bibliography 129
6 • DISTANCE MEASUREMENT 131
PART I METHODS FOR MEASURING DISTANCES 131
6.1 Introduction 131
6.2 Summary of Methods for Making Linear Measurements 131
6.3 Pacing 132
6.4 Odometer Readings 132
6.5 Optical Rangefinders 133
6.6 Tacheometry 133
6.7 Subtense Bar 133
PART II DISTANCE MEASUREMENTS BY TAPING 133
6.8 Introduction to Taping 133
6.9 Taping Equipment and Accessories 134
6.10 Care of Taping Equipment 135
6.11 Taping on Level Ground 136
6.12 Horizontal Measurements on Sloping Ground 138
6.13 Slope Measurements 140
6.14 Sources of Error in Taping 141
6.15 Tape Problems 145
6.16 Combined Corrections in a Taping Problem 147
PART III ELECTRONIC DISTANCE MEASUREMENT 148
6.17 Introduction 148
6.18 Propagation of Electromagnetic Energy 149
6.19 Principles of Electronic Distance Measurement 152
6.20 Electro-Optical Instruments 153
6.21 Total Station Instruments 156
6.22 EDM Instruments Without Reflectors 157
6.23 Computing Horizontal Lengths from Slope Distances 158
6.24 Errors in Electronic Distance Measurement 160
6.25 Using Software 165
Problems 165
Bibliography 168
7 • ANGLES, AZIMUTHS, AND BEARINGS 169
7.1 Introduction 169
7.2 Units of Angle Measurement 169
7.3 Kinds of Horizontal Angles 170
7.4 Direction of a Line 171
7.5 Azimuths 172
7.6 Bearings 173
7.7 Comparison of Azimuths and Bearings 174
7.8 Computing Azimuths 175
7.9 Computing Bearings 177
7.10 The Compass and the Earth’s Magnetic Field 179
7.11 Magnetic Declination 180
7.12 Variations in Magnetic Declination 181
7.13 Software for Determining Magnetic Declination 183
7.14 Local Attraction 184
7.15 Typical Magnetic Declination Problems 185
7.16 Mistakes 187
Problems 187
Bibliography 189
8 • TOTAL STATION INSTRUMENTS; ANGLE OBSERVATIONS 191
PART I TOTAL STATION INSTRUMENTS 191
8.1 Introduction 191
8.2 Characteristics of Total Station Instruments 191
8.3 Functions Performed by Total Station Instruments 194
8.4 Parts of a Total Station Instrument 195
8.5 Handling and Setting Up a Total Station Instrument 199
8.6 Servo-Driven and Remotely Operated Total Station Instruments 201
PART II ANGLE OBSERVATIONS 203
8.7 Relationship of Angles and Distances 203
8.8 Observing Horizontal Angles with Total Station Instruments 204
8.9 Observing Horizontal Angles by the Direction Method 206
8.10 Closing the Horizon 207
8.11 Observing Deflection Angles 209
8.12 Observing Azimuths 211
8.13 Observing Vertical Angles 211
8.14 Sights and Marks 213
8.15 Prolonging a Straight Line 214
8.16 Balancing-In 216
8.17 Random Traverse 217
8.18 Total Stations for Determining Elevation Differences 218
8.19 Adjustment of Total Station Instruments and Their Accessories 219
8.20 Sources of Error in Total Station Work 222
8.21 Propagation of Random Errors in Angle Observations 228
8.22 Mistakes 228
Problems 229
Bibliography 230
9 • TRAVERSING 231
9.1 Introduction 231
9.2 Observation of Traverse Angles or Directions 233
9.3 Observation of Traverse Lengths 234
9.4 Selection of Traverse Stations 235
9.5 Referencing Traverse Stations 235
9.6 Traverse Field Notes 237
9.7 Angle Misclosure 238
9.8 Traversing with Total Station Instruments 239
9.9 Radial Traversing 240
9.10 Sources of Error in Traversing 241
9.11 Mistakes in Traversing 242
Problems 242
10 • TRAVERSE COMPUTATIONS 245
10.1 Introduction 245
10.2 Balancing Angles 246
10.3 Computation of Preliminary Azimuths or Bearings 248
10.4 Departures and Latitudes 249
10.5 Departure and Latitude Closure Conditions 251
10.6 Traverse Linear Misclosure and Relative Precision 251
10.7 Traverse Adjustment 252
10.8 Rectangular Coordinates 255
10.9 Alternative Methods for Making Traverse Computations 256
10.10 Inversing 260
10.11 Computing Final Adjusted Traverse Lengths and Directions 261
10.12 Coordinate Computations in Boundary Surveys 263
10.13 Use of Open Traverses 265
10.14 State Plane Coordinate Systems 268
10.15 Traverse Computations Using Computers 269
10.16 Locating Blunders in Traverse Observations 269
10.17 Mistakes in Traverse Computations 272
Problems 272
Bibliography 275
11 • COORDINATE GEOMETRY IN SURVEYING CALCULATIONS 277
11.1 Introduction 277
11.2 Coordinate Forms of Equations for Lines and Circles 278
11.3 Perpendicular Distance from a Point to a Line 280
11.4 Intersection of Two Lines, Both Having Known Directions 282
11.5 Intersection of a Line with a Circle 284
11.6 Intersection of Two Circles 287
11.7 Three-Point Resection 289
11.8 Two-Dimensional Conformal Coordinate Transformation 292
11.9 Inaccessible Point Problem 297
11.10 Three-Dimensional Two-Point Resection 299
11.11 Software 302
Problems 303
Bibliography 307
12 • AREA 309
12.1 Introduction 309
12.2 Methods of Measuring Area 309
12.3 Area by Division Into Simple Figures 310
12.4 Area by Offsets from Straight Lines 311
12.5 Area by Coordinates 313
12.6 Area by Double-Meridian Distance Method 317
12.7 Area of Parcels with Circular Boundaries 320
12.8 Partitioning of Lands 321
12.9 Area by Measurements from Maps 325
12.10 Software 327
12.11 Sources of Error in Determining Areas 328
12.12 Mistakes in Determining Areas 328
Problems 328
Bibliography 330
13 • GLOBAL NAVIGATION SATELLITE SYSTEMS—INTRODUCTION AND PRINCIPLES OF OPERATION 331
13.1 Introduction 331
13.2 Overview of GPS 332
13.3 The GPS Signal 335
13.4 Reference Coordinate Systems 337
13.5 Fundamentals of Satellite Positioning 345
13.6 Errors in Observations 348
13.7 Differential Positioning 356
13.8 Kinematic Methods 358
13.9 Relative Positioning 359
13.10 Other Satellite Navigation Systems 362
13.11 The Future 364
Problems 365
Bibliography 366
14 • GLOBAL NAVIGATION SATELLITE SYSTEMS—STATIC SURVEYS 367
14.1 Introduction 367
14.2 Field Procedures in Satellite Surveys 369
14.3 Planning Satellite Surveys 372
14.4 Performing Static Surveys 384
14.5 Data Processing and Analysis 386
14.6 Sources of Errors in Satellite Surveys 393
14.7 Mistakes in Satellite Surveys 395
Problems 395
Bibliography 397
15 • GLOBAL NAVIGATION SATELLITE SYSTEMS—KINEMATIC SURVEYS 399
15.1 Introduction 399
15.2 Planning of Kinematic Surveys 400
15.3 Initialization 402
15.4 Equipment Used in Kinematic Surveys 403
15.5 Methods Used in Kinematic Surveys 405
15.6 Performing Post-Processed Kinematic Surveys 408
15.7 Communication in Real-Time Kinematic Surveys 411
15.8 Real-Time Networks 412
15.9 Performing Real-Time Kinematic Surveys 413
15.10 Machine Control 414
15.11 Errors in Kinematic Surveys 418
15.12 Mistakes in Kinematic Surveys 418
Problems 418
Bibliography 419
16 • ADJUSTMENTS BY LEAST SQUARES 421
16.1 Introduction 421
16.2 Fundamental Condition of Least Squares 423
16.3 Least-Squares Adjustment by the Observation Equation Method 424
16.4 Matrix Methods in Least-Squares Adjustment 428
16.5 Matrix Equations for Precisions of Adjusted Quantities 430
16.6 Least-Squares Adjustment of Leveling Circuits 432
16.7 Propagation of Errors 436
16.8 Least-Squares Adjustment of GNSS Baseline Vectors 437
16.9 Least-Squares Adjustment of Conventional Horizontal Plane Surveys 443
16.10 The Error Ellipse 452
16.11 Adjustment Procedures 457
16.12 Other Measures of Precision for Horizontal Stations 458
16.13 Software 460
16.14 Conclusions 460
Problems 461
Bibliography 466
17 • MAPPING SURVEYS 467
17.1 Introduction 467
17.2 Basic Methods for Performing Mapping Surveys 468
17.3 Map Scale 468
17.4 Control for Mapping Surveys 470
17.5 Contours 471
17.6 Characteristics of Contours 474
17.7 Direct and Indirect Methods of Locating Contours 474
17.8 Digital Elevation Models and Automated Contouring Systems 477
17.9 Basic Field Methods for Locating Topographic Details 479
17.10 Three-Dimensional Conformal Coordinate Transformation 488
17.11 Selection of Field Method 489
17.12 Working with Data Collectors and Field-to-Finish Software 490
17.13 Hydrographic Surveys 493
17.14 Sources of Error in Mapping Surveys 497
17.15 Mistakes in Mapping Surveys 498
Problems 498
Bibliography 500
18 • MAPPING 503
18.1 Introduction 503
18.2 Availability of Maps and Related Information 504
18.3 National Mapping Program 505
18.4 Accuracy Standards for Mapping 505
18.5 Manual and Computer-Aided Drafting Procedures 507
18.6 Map Design 508
18.7 Map Layout 510
18.8 Basic Map Plotting Procedures 512
18.9 Contour Interval 514
18.10 Plotting Contours 514
18.11 Lettering 515
18.12 Cartographic Map Elements 516
18.13 Drafting Materials 519
18.14 Automated Mapping and Computer-Aided Drafting Systems 519
18.15 Impacts of Modern Land and Geographic Information Systems on Mapping 525
18.16 Sources of Error in Mapping 526
18.17 Mistakes in Mapping 526
Problems 526
Bibliography 528
19 • CONTROL SURVEYS AND GEODETIC REDUCTIONS 529
19.1 Introduction 529
19.2 The Ellipsoid and Geoid 530
19.3 The Conventional Terrestrial Pole 532
19.4 Geodetic Position and Ellipsoidal Radii of Curvature 534
19.5 Geoid Undulation and Deflection of the Vertical 536
19.6 U.S. Reference Frames 538
19.7 Accuracy Standards and Specifications for Control Surveys 547
19.8 The National Spatial Reference System 550
19.9 Hierarchy of the National Horizontal Control Network 550
19.10 Hierarchy of the National Vertical Control Network 551
19.11 Control Point Descriptions 551
19.12 Field Procedures for Traditional Horizontal Control Surveys 554
19.13 Field Procedures for Vertical Control Surveys 559
19.14 Reduction of Field Observations to Their Geodetic Values 564
19.15 Geodetic Position Computations 577
19.16 The Local Geodetic Coordinate System 580
19.17 Three-Dimensional Coordinate Computations 581
19.18 Software 584
Problems 584
Bibliography 587
20 • STATE PLANE COORDINATES AND OTHER MAP PROJECTIONS 589
20.1 Introduction 589
20.2 Projections Used in State Plane Coordinate Systems 590
20.3 Lambert Conformal Conic Projection 593
20.4 Transverse Mercator Projection 594
20.5 State Plane Coordinates in NAD27 and NAD83 595
20.6 Computing SPCS83 Coordinates in the Lambert Conformal Conic System 596
20.7 Computing SPCS83 Coordinates in the Transverse Mercator System 601
20.8 Reduction of Distances and Angles to State Plane Coordinate Grids 608
20.9 Computing State Plane Coordinates of Traverse Stations 617
20.10 Surveys Extending from One Zone to Another 620
20.11 Conversions Between SPCS27 and SPCS83 621
20.12 The Universal Transverse Mercator Projection 622
20.13 Other Map Projections 623
20.14 Map Projection Software 627
Problems 628
Bibliography 631
21 • BOUNDARY SURVEYS 633
21.1 Introduction 633
21.2 Categories of Land Surveys 634
21.3 Historical Perspectives 635
21.4 Property Description by Metes and Bounds 636
21.5 Property Description by Block-and-Lot System 639
21.6 Property Description by Coordinates 641
21.7 Retracement Surveys 641
21.8 Subdivision Surveys 644
21.9 Partitioning Land 646
21.10 Registration of Title 647
21.11 Adverse Possession and Easements 648
21.12 Condominium Surveys 648
21.13 Geographic and Land Information Systems 655
21.14 Sources of Error in Boundary Surveys 655
21.15 Mistakes 655
Problems 656
Bibliography 658
22 • SURVEYS OF THE PUBLIC LANDS 659
22.1 Introduction 659
22.2 Instructions for Surveys of the Public Lands 660
22.3 Initial Point 663
22.4 Principal Meridian 664
22.5 Baseline 665
22.6 Standard Parallels (Correction Lines) 666
22.7 Guide Meridians 666
22.8 Township Exteriors, Meridional (Range) Lines, and Latitudinal (Township) Lines 667
22.9 Designation of Townships 668
22.10 Subdivision of a Quadrangle into Townships 668
22.11 Subdivision of a Township into Sections 670
22.12 Subdivision of Sections 671
22.13 Fractional Sections 672
22.14 Notes 672
22.15 Outline of Subdivision Steps 672
22.16 Marking Corners 674
22.17 Witness Corners 674
22.18 Meander Corners 675
22.19 Lost and Obliterated Corners 675
22.20 Accuracy of Public Lands Surveys 678
22.21 Descriptions by Township Section and Smaller Subdivision 678
22.22 BLM Land Information System 679
22.23 Sources of Error 680
22.24 Mistakes 680
Problems 681
Bibliography 683
23 • CONSTRUCTION SURVEYS 685
23.1 Introduction 685
23.2 Specialized Equipment for Construction Surveys 686
23.3 Horizontal and Vertical Control 689
23.4 Staking Out a Pipeline 691
23.5 Staking Pipeline Grades 692
23.6 Staking Out a Building 694
23.7 Staking Out Highways 698
23.8 Other Construction Surveys 703
23.9 Construction Surveys Using Total Station Instruments 704
23.10 Construction Surveys Using GNSS Equipment 706
23.11 Machine Guidance and Control 709
23.12 As-Built Surveys with Laser Scanning 710
23.13 Sources of Error in Construction Surveys 711
23.14 Mistakes 712
Problems 712
Bibliography 714
24 • HORIZONTAL CURVES 715
24.1 Introduction 715
24.2 Degree of Circular Curve 716
24.3 Definitions and Derivation of Circular Curve Formulas 718
24.4 Circular Curve Stationing 720
24.5 General Procedure of Circular Curve Layout by Deflection Angles 721
24.6 Computing Deflection Angles and Chords 723
24.7 Notes for Circular Curve Layout by Deflection Angles and Incremental Chords 725
24.8 Detailed Procedures for Circular Curve Layout by Deflection Angles and Incremental Chords 726
24.9 Setups on Curve 727
24.10 Metric Circular Curves by Deflection Angles and Incremental Chords 728
24.11 Circular Curve Layout by Deflection Angles and Total Chords 730
24.12 Computation of Coordinates on a Circular Curve 731
24.13 Circular Curve Layout by Coordinates 733
24.14 Curve Stakeout Using GNSS Receivers and Robotic Total Stations 738
24.15 Circular Curve Layout by Offsets 739
24.16 Special Circular Curve Problems 742
24.17 Compound and Reverse Curves 743
24.18 Sight Distance on Horizontal Curves 743
24.19 Spirals 744
24.20 Computation of “As-Built” Circular Alignments 749
24.21 Sources of Error in Laying Out Circular Curves 752
24.22 Mistakes 752
Problems 753
Bibliography 755
25 • VERTICAL CURVES 757
25.1 Introduction 757
25.2 General Equation of a Vertical Parabolic Curve 758
25.3 Equation of an Equal Tangent Vertical Parabolic Curve 759
25.4 High or Low Point on a Vertical Curve 761
25.5 Vertical Curve Computations Using the Tangent Offset Equation 761
25.6 Equal Tangent Property of a Parabola 765
25.7 Curve Computations by Proportion 766
25.8 Staking a Vertical Parabolic Curve 766
25.9 Machine Control in Grading Operations 767
25.10 Computations for an Unequal Tangent Vertical Curve 767
25.11 Designing a Curve to Pass Through a Fixed Point 770
25.12 Sight Distance 771
25.13 Sources of Error in Laying Out Vertical Curves 773
25.14 Mistakes 774
Problems 774
Bibliography 776
26 • VOLUMES 777
26.1 Introduction 777
26.2 Methods of Volume Measurement 777
26.3 The Cross-Section Method 778
26.4 Types of Cross Sections 779
26.5 Average-End-Area Formula 780
26.6 Determining End Areas 781
26.7 Computing Slope Intercepts 784
26.8 Prismoidal Formula 786
26.9 Volume Computations 788
26.10 Unit-Area, or Borrow-Pit, Method 790
26.11 Contour-Area Method 791
26.12 Measuring Volumes of Water Discharge 793
26.13 Software 794
26.14 Sources of Error in Determining Volumes 795
26.15 Mistakes 795
Problems 795
Bibliography 798
27 • PHOTOGRAMMETRY 799
27.1 Introduction 799
27.2 Uses of Photogrammetry 800
27.3 Aerial Cameras 801
27.4 Types of Aerial Photographs 803
27.5 Vertical Aerial Photographs 804
27.6 Scale of a Vertical Photograph 806
27.7 Ground Coordinates from a Single Vertical Photograph 810
27.8 Relief Displacement on a Vertical Photograph 811
27.9 Flying Height of a Vertical Photograph 813
27.10 Stereoscopic Parallax 814
27.11 Stereoscopic Viewing 817
27.12 Stereoscopic Measurement of Parallax 819
27.13 Analytical Photogrammetry 820
27.14 Stereoscopic Plotting Instruments 821
27.15 Orthophotos 826
27.16 Ground Control for Photogrammetry 827
27.17 Flight Planning 828
27.18 Airborne Laser-Mapping Systems 830
27.19 Remote Sensing 831
27.20 Software 837
27.21 Sources of Error in Photogrammetry 838
27.22 Mistakes 838
Problems 839
Bibliography 842
28 • INTRODUCTION TO GEOGRAPHIC INFORMATION SYSTEMS 843
28.1 Introduction 843
28.2 Land Information Systems 846
28.3 GIS Data Sources and Classifications 846
28.4 Spatial Data 846
28.5 Nonspatial Data 852
28.6 Data Format Conversions 853
28.7 Creating GIS Databases 856
28.8 Metadata 862
28.9 GIS Analytical Functions 862
28.10 GIS Applications 867
28.11 Data Sources 867
Problems 869
Bibliography 871
APPENDIX A • DUMPY LEVELS, TRANSITS, AND THEODOLITES 873
APPENDIX B • EXAMPLE NOTEFORMS 888
APPENDIX C • ASTRONOMICAL OBSERVATIONS 895
APPENDIX D • USING THE WORKSHEETS FROM THE COMPANION WEBSITE 911
APPENDIX E • INTRODUCTION TO MATRICES 917
APPENDIX F • U.S. STATE PLANE COORDINATE SYSTEM DEFINING PARAMETERS 923
APPENDIX G • ANSWERS TO SELECTED PROBLEMS 927
INDEX 933
0 notes
Text
Solution Manual for Elementary Surveying: An Introduction to Geomatics, 13th Edition Charles D. Ghilani
This is Full Solution Manual for Elementary Surveying: An Introduction to Geomatics, 13th Edition Charles D. Ghilani
Click link bellow to view sample:
https://getbooksolutions.com/wp-content/uploads/2017/01/Solution-Manual-for-Elementary-Surveying-An-Introduction-to-Geomatics-13th-Edition-Charles-D-Ghilani.pdf
Origin Book information:
Charles D. Ghilani
Hardcover: 984 pages
Publisher: Prentice Hall; 13 edition (January 8, 2011)
Language: English
ISBN-10: 0132554348
ISBN-13: 978-0132554343
what is solution manual elementary surveying an introduction to geomatics 13th edition
where you can download solution manual elementary surveying an introduction to geomatics 13th edition?
and how you can get solution manual elementary surveying an introduction to geomatics 13th edition in fastest way?
You will be guided to the product download page immediately once you complete the payment.If you have any questions, or would like a receive a sample chapter before your purchase, please contact us via email :
Full download link:
https://getbooksolutions.com/download/solution-manual-for-elementary-surveying-an-introduction-to-geomatics-13th-edition-charles-d-ghilani
Table of Contents
1 • INTRODUCTION 1
1.1 Definition of Surveying 1
1.2 Geomatics 3
1.3 History of Surveying 4
1.4 Geodetic and Plane Surveys 9
1.5 Importance of Surveying 10
1.6 Specialized Types of Surveys 11
1.7 Surveying Safety 13
1.8 Land and Geographic Information Systems 14
1.9 Federal Surveying and Mapping Agencies 15
1.10 The Surveying Profession 16
1.11 Professional Surveying Organizations 17
1.12 Surveying on the Internet 18
1.13 Future Challenges in Surveying 19
Problems 20
Bibliography 21
2 • UNITS, SIGNIFICANT FIGURES, AND FIELD NOTES 23
PART I UNITS AND SIGNIFICANT FIGURES 23
2.1 Introduction 23
2.2 Units of Measurement 23
2.3 International System of Units (SI) 25
2.4 Significant Figures 27
2.5 Rounding Off Numbers 29
PART II FIELD NOTES 30
2.6 Field Notes 30
2.7 General Requirements of Handwritten Field Notes 31
2.8 Types of Field Books 32
2.9 Kinds of Notes 33
2.10 Arrangements of Notes 33
2.11 Suggestions for Recording Notes 35
2.12 Introduction to Data Collectors 36
2.13 Transfer of Files from Data Collectors 39
2.14 Digital Data File Management 41
2.15 Advantages and Disadvantages of Data Collectors 42
Problems 43
Bibliography 44
3 • THEORY OF ERRORS IN OBSERVATIONS 45
3.1 Introduction 45
3.2 Direct and Indirect Observations 45
3.3 Errors in Measurements 46
3.4 Mistakes 46
3.5 Sources of Errors in Making Observations 47
3.6 Types of Errors 47
3.7 Precision and Accuracy 48
3.8 Eliminating Mistakes and Systematic Errors 49
3.9 Probability 49
3.10 Most Probable Value 50
3.11 Residuals 51
3.12 Occurrence of Random Errors 51
3.13 General Laws of Probability 55
3.14 Measures of Precision 55
3.15 Interpretation of Standard Deviation 58
3.16 The 50, 90, and 95 Percent Errors 58
3.17 Error Propagation 60
3.18 Applications 65
3.19 Conditional Adjustment of Observations 65
3.20 Weights of Observations 66
3.21 Least-Squares Adjustment 67
3.22 Using Software 68
Problems 69
Bibliography 71
4 • LEVELING–THEORY, METHODS, AND EQUIPMENT 73
PART I LEVELING–THEORY AND METHODS 73
4.1 Introduction 73
4.2 Definitions 73
4.3 North American Vertical Datum 75
4.4 Curvature and Refraction 76
4.5 Methods for Determining Differences in Elevation 78
PART II EQUIPMENT FOR DIFFERENTIAL LEVELING 85
4.6 Categories of Levels 85
4.7 Telescopes 86
4.8 Level Vials 87
4.9 Tilting Levels 89
4.10 Automatic Levels 90
4.11 Digital Levels 91
4.12 Tripods 93
4.13 Hand Level 93
4.14 Level Rods 94
4.15 Testing and Adjusting Levels 96
Problems 100
Bibliography 102
5 • LEVELING–FIELD PROCEDURES AND COMPUTATIONS 103
5.1 Introduction 103
5.2 Carrying and Setting Up a Level 103
5.3 Duties of a Rodperson 105
5.4 Differential Leveling 106
5.5 Precision 112
5.6 Adjustments of Simple Level Circuits 113
5.7 Reciprocal Leveling 114
5.8 Three-Wire Leveling 115
5.9 Profile Leveling 117
5.10 Grid, Cross-Section, or Borrow-Pit Leveling 121
5.11 Use of the Hand Level 122
5.12 Sources of Error in Leveling 122
5.13 Mistakes 124
5.14 Reducing Errors and Eliminating Mistakes 125
5.15 Using Software 125
Problems 127
Bibliography 129
6 • DISTANCE MEASUREMENT 131
PART I METHODS FOR MEASURING DISTANCES 131
6.1 Introduction 131
6.2 Summary of Methods for Making Linear Measurements 131
6.3 Pacing 132
6.4 Odometer Readings 132
6.5 Optical Rangefinders 133
6.6 Tacheometry 133
6.7 Subtense Bar 133
PART II DISTANCE MEASUREMENTS BY TAPING 133
6.8 Introduction to Taping 133
6.9 Taping Equipment and Accessories 134
6.10 Care of Taping Equipment 135
6.11 Taping on Level Ground 136
6.12 Horizontal Measurements on Sloping Ground 138
6.13 Slope Measurements 140
6.14 Sources of Error in Taping 141
6.15 Tape Problems 145
6.16 Combined Corrections in a Taping Problem 147
PART III ELECTRONIC DISTANCE MEASUREMENT 148
6.17 Introduction 148
6.18 Propagation of Electromagnetic Energy 149
6.19 Principles of Electronic Distance Measurement 152
6.20 Electro-Optical Instruments 153
6.21 Total Station Instruments 156
6.22 EDM Instruments Without Reflectors 157
6.23 Computing Horizontal Lengths from Slope Distances 158
6.24 Errors in Electronic Distance Measurement 160
6.25 Using Software 165
Problems 165
Bibliography 168
7 • ANGLES, AZIMUTHS, AND BEARINGS 169
7.1 Introduction 169
7.2 Units of Angle Measurement 169
7.3 Kinds of Horizontal Angles 170
7.4 Direction of a Line 171
7.5 Azimuths 172
7.6 Bearings 173
7.7 Comparison of Azimuths and Bearings 174
7.8 Computing Azimuths 175
7.9 Computing Bearings 177
7.10 The Compass and the Earth’s Magnetic Field 179
7.11 Magnetic Declination 180
7.12 Variations in Magnetic Declination 181
7.13 Software for Determining Magnetic Declination 183
7.14 Local Attraction 184
7.15 Typical Magnetic Declination Problems 185
7.16 Mistakes 187
Problems 187
Bibliography 189
8 • TOTAL STATION INSTRUMENTS; ANGLE OBSERVATIONS 191
PART I TOTAL STATION INSTRUMENTS 191
8.1 Introduction 191
8.2 Characteristics of Total Station Instruments 191
8.3 Functions Performed by Total Station Instruments 194
8.4 Parts of a Total Station Instrument 195
8.5 Handling and Setting Up a Total Station Instrument 199
8.6 Servo-Driven and Remotely Operated Total Station Instruments 201
PART II ANGLE OBSERVATIONS 203
8.7 Relationship of Angles and Distances 203
8.8 Observing Horizontal Angles with Total Station Instruments 204
8.9 Observing Horizontal Angles by the Direction Method 206
8.10 Closing the Horizon 207
8.11 Observing Deflection Angles 209
8.12 Observing Azimuths 211
8.13 Observing Vertical Angles 211
8.14 Sights and Marks 213
8.15 Prolonging a Straight Line 214
8.16 Balancing-In 216
8.17 Random Traverse 217
8.18 Total Stations for Determining Elevation Differences 218
8.19 Adjustment of Total Station Instruments and Their Accessories 219
8.20 Sources of Error in Total Station Work 222
8.21 Propagation of Random Errors in Angle Observations 228
8.22 Mistakes 228
Problems 229
Bibliography 230
9 • TRAVERSING 231
9.1 Introduction 231
9.2 Observation of Traverse Angles or Directions 233
9.3 Observation of Traverse Lengths 234
9.4 Selection of Traverse Stations 235
9.5 Referencing Traverse Stations 235
9.6 Traverse Field Notes 237
9.7 Angle Misclosure 238
9.8 Traversing with Total Station Instruments 239
9.9 Radial Traversing 240
9.10 Sources of Error in Traversing 241
9.11 Mistakes in Traversing 242
Problems 242
10 • TRAVERSE COMPUTATIONS 245
10.1 Introduction 245
10.2 Balancing Angles 246
10.3 Computation of Preliminary Azimuths or Bearings 248
10.4 Departures and Latitudes 249
10.5 Departure and Latitude Closure Conditions 251
10.6 Traverse Linear Misclosure and Relative Precision 251
10.7 Traverse Adjustment 252
10.8 Rectangular Coordinates 255
10.9 Alternative Methods for Making Traverse Computations 256
10.10 Inversing 260
10.11 Computing Final Adjusted Traverse Lengths and Directions 261
10.12 Coordinate Computations in Boundary Surveys 263
10.13 Use of Open Traverses 265
10.14 State Plane Coordinate Systems 268
10.15 Traverse Computations Using Computers 269
10.16 Locating Blunders in Traverse Observations 269
10.17 Mistakes in Traverse Computations 272
Problems 272
Bibliography 275
11 • COORDINATE GEOMETRY IN SURVEYING CALCULATIONS 277
11.1 Introduction 277
11.2 Coordinate Forms of Equations for Lines and Circles 278
11.3 Perpendicular Distance from a Point to a Line 280
11.4 Intersection of Two Lines, Both Having Known Directions 282
11.5 Intersection of a Line with a Circle 284
11.6 Intersection of Two Circles 287
11.7 Three-Point Resection 289
11.8 Two-Dimensional Conformal Coordinate Transformation 292
11.9 Inaccessible Point Problem 297
11.10 Three-Dimensional Two-Point Resection 299
11.11 Software 302
Problems 303
Bibliography 307
12 • AREA 309
12.1 Introduction 309
12.2 Methods of Measuring Area 309
12.3 Area by Division Into Simple Figures 310
12.4 Area by Offsets from Straight Lines 311
12.5 Area by Coordinates 313
12.6 Area by Double-Meridian Distance Method 317
12.7 Area of Parcels with Circular Boundaries 320
12.8 Partitioning of Lands 321
12.9 Area by Measurements from Maps 325
12.10 Software 327
12.11 Sources of Error in Determining Areas 328
12.12 Mistakes in Determining Areas 328
Problems 328
Bibliography 330
13 • GLOBAL NAVIGATION SATELLITE SYSTEMS—INTRODUCTION AND PRINCIPLES OF OPERATION 331
13.1 Introduction 331
13.2 Overview of GPS 332
13.3 The GPS Signal 335
13.4 Reference Coordinate Systems 337
13.5 Fundamentals of Satellite Positioning 345
13.6 Errors in Observations 348
13.7 Differential Positioning 356
13.8 Kinematic Methods 358
13.9 Relative Positioning 359
13.10 Other Satellite Navigation Systems 362
13.11 The Future 364
Problems 365
Bibliography 366
14 • GLOBAL NAVIGATION SATELLITE SYSTEMS—STATIC SURVEYS 367
14.1 Introduction 367
14.2 Field Procedures in Satellite Surveys 369
14.3 Planning Satellite Surveys 372
14.4 Performing Static Surveys 384
14.5 Data Processing and Analysis 386
14.6 Sources of Errors in Satellite Surveys 393
14.7 Mistakes in Satellite Surveys 395
Problems 395
Bibliography 397
15 • GLOBAL NAVIGATION SATELLITE SYSTEMS—KINEMATIC SURVEYS 399
15.1 Introduction 399
15.2 Planning of Kinematic Surveys 400
15.3 Initialization 402
15.4 Equipment Used in Kinematic Surveys 403
15.5 Methods Used in Kinematic Surveys 405
15.6 Performing Post-Processed Kinematic Surveys 408
15.7 Communication in Real-Time Kinematic Surveys 411
15.8 Real-Time Networks 412
15.9 Performing Real-Time Kinematic Surveys 413
15.10 Machine Control 414
15.11 Errors in Kinematic Surveys 418
15.12 Mistakes in Kinematic Surveys 418
Problems 418
Bibliography 419
16 • ADJUSTMENTS BY LEAST SQUARES 421
16.1 Introduction 421
16.2 Fundamental Condition of Least Squares 423
16.3 Least-Squares Adjustment by the Observation Equation Method 424
16.4 Matrix Methods in Least-Squares Adjustment 428
16.5 Matrix Equations for Precisions of Adjusted Quantities 430
16.6 Least-Squares Adjustment of Leveling Circuits 432
16.7 Propagation of Errors 436
16.8 Least-Squares Adjustment of GNSS Baseline Vectors 437
16.9 Least-Squares Adjustment of Conventional Horizontal Plane Surveys 443
16.10 The Error Ellipse 452
16.11 Adjustment Procedures 457
16.12 Other Measures of Precision for Horizontal Stations 458
16.13 Software 460
16.14 Conclusions 460
Problems 461
Bibliography 466
17 • MAPPING SURVEYS 467
17.1 Introduction 467
17.2 Basic Methods for Performing Mapping Surveys 468
17.3 Map Scale 468
17.4 Control for Mapping Surveys 470
17.5 Contours 471
17.6 Characteristics of Contours 474
17.7 Direct and Indirect Methods of Locating Contours 474
17.8 Digital Elevation Models and Automated Contouring Systems 477
17.9 Basic Field Methods for Locating Topographic Details 479
17.10 Three-Dimensional Conformal Coordinate Transformation 488
17.11 Selection of Field Method 489
17.12 Working with Data Collectors and Field-to-Finish Software 490
17.13 Hydrographic Surveys 493
17.14 Sources of Error in Mapping Surveys 497
17.15 Mistakes in Mapping Surveys 498
Problems 498
Bibliography 500
18 • MAPPING 503
18.1 Introduction 503
18.2 Availability of Maps and Related Information 504
18.3 National Mapping Program 505
18.4 Accuracy Standards for Mapping 505
18.5 Manual and Computer-Aided Drafting Procedures 507
18.6 Map Design 508
18.7 Map Layout 510
18.8 Basic Map Plotting Procedures 512
18.9 Contour Interval 514
18.10 Plotting Contours 514
18.11 Lettering 515
18.12 Cartographic Map Elements 516
18.13 Drafting Materials 519
18.14 Automated Mapping and Computer-Aided Drafting Systems 519
18.15 Impacts of Modern Land and Geographic Information Systems on Mapping 525
18.16 Sources of Error in Mapping 526
18.17 Mistakes in Mapping 526
Problems 526
Bibliography 528
19 • CONTROL SURVEYS AND GEODETIC REDUCTIONS 529
19.1 Introduction 529
19.2 The Ellipsoid and Geoid 530
19.3 The Conventional Terrestrial Pole 532
19.4 Geodetic Position and Ellipsoidal Radii of Curvature 534
19.5 Geoid Undulation and Deflection of the Vertical 536
19.6 U.S. Reference Frames 538
19.7 Accuracy Standards and Specifications for Control Surveys 547
19.8 The National Spatial Reference System 550
19.9 Hierarchy of the National Horizontal Control Network 550
19.10 Hierarchy of the National Vertical Control Network 551
19.11 Control Point Descriptions 551
19.12 Field Procedures for Traditional Horizontal Control Surveys 554
19.13 Field Procedures for Vertical Control Surveys 559
19.14 Reduction of Field Observations to Their Geodetic Values 564
19.15 Geodetic Position Computations 577
19.16 The Local Geodetic Coordinate System 580
19.17 Three-Dimensional Coordinate Computations 581
19.18 Software 584
Problems 584
Bibliography 587
20 • STATE PLANE COORDINATES AND OTHER MAP PROJECTIONS 589
20.1 Introduction 589
20.2 Projections Used in State Plane Coordinate Systems 590
20.3 Lambert Conformal Conic Projection 593
20.4 Transverse Mercator Projection 594
20.5 State Plane Coordinates in NAD27 and NAD83 595
20.6 Computing SPCS83 Coordinates in the Lambert Conformal Conic System 596
20.7 Computing SPCS83 Coordinates in the Transverse Mercator System 601
20.8 Reduction of Distances and Angles to State Plane Coordinate Grids 608
20.9 Computing State Plane Coordinates of Traverse Stations 617
20.10 Surveys Extending from One Zone to Another 620
20.11 Conversions Between SPCS27 and SPCS83 621
20.12 The Universal Transverse Mercator Projection 622
20.13 Other Map Projections 623
20.14 Map Projection Software 627
Problems 628
Bibliography 631
21 • BOUNDARY SURVEYS 633
21.1 Introduction 633
21.2 Categories of Land Surveys 634
21.3 Historical Perspectives 635
21.4 Property Description by Metes and Bounds 636
21.5 Property Description by Block-and-Lot System 639
21.6 Property Description by Coordinates 641
21.7 Retracement Surveys 641
21.8 Subdivision Surveys 644
21.9 Partitioning Land 646
21.10 Registration of Title 647
21.11 Adverse Possession and Easements 648
21.12 Condominium Surveys 648
21.13 Geographic and Land Information Systems 655
21.14 Sources of Error in Boundary Surveys 655
21.15 Mistakes 655
Problems 656
Bibliography 658
22 • SURVEYS OF THE PUBLIC LANDS 659
22.1 Introduction 659
22.2 Instructions for Surveys of the Public Lands 660
22.3 Initial Point 663
22.4 Principal Meridian 664
22.5 Baseline 665
22.6 Standard Parallels (Correction Lines) 666
22.7 Guide Meridians 666
22.8 Township Exteriors, Meridional (Range) Lines, and Latitudinal (Township) Lines 667
22.9 Designation of Townships 668
22.10 Subdivision of a Quadrangle into Townships 668
22.11 Subdivision of a Township into Sections 670
22.12 Subdivision of Sections 671
22.13 Fractional Sections 672
22.14 Notes 672
22.15 Outline of Subdivision Steps 672
22.16 Marking Corners 674
22.17 Witness Corners 674
22.18 Meander Corners 675
22.19 Lost and Obliterated Corners 675
22.20 Accuracy of Public Lands Surveys 678
22.21 Descriptions by Township Section and Smaller Subdivision 678
22.22 BLM Land Information System 679
22.23 Sources of Error 680
22.24 Mistakes 680
Problems 681
Bibliography 683
23 • CONSTRUCTION SURVEYS 685
23.1 Introduction 685
23.2 Specialized Equipment for Construction Surveys 686
23.3 Horizontal and Vertical Control 689
23.4 Staking Out a Pipeline 691
23.5 Staking Pipeline Grades 692
23.6 Staking Out a Building 694
23.7 Staking Out Highways 698
23.8 Other Construction Surveys 703
23.9 Construction Surveys Using Total Station Instruments 704
23.10 Construction Surveys Using GNSS Equipment 706
23.11 Machine Guidance and Control 709
23.12 As-Built Surveys with Laser Scanning 710
23.13 Sources of Error in Construction Surveys 711
23.14 Mistakes 712
Problems 712
Bibliography 714
24 • HORIZONTAL CURVES 715
24.1 Introduction 715
24.2 Degree of Circular Curve 716
24.3 Definitions and Derivation of Circular Curve Formulas 718
24.4 Circular Curve Stationing 720
24.5 General Procedure of Circular Curve Layout by Deflection Angles 721
24.6 Computing Deflection Angles and Chords 723
24.7 Notes for Circular Curve Layout by Deflection Angles and Incremental Chords 725
24.8 Detailed Procedures for Circular Curve Layout by Deflection Angles and Incremental Chords 726
24.9 Setups on Curve 727
24.10 Metric Circular Curves by Deflection Angles and Incremental Chords 728
24.11 Circular Curve Layout by Deflection Angles and Total Chords 730
24.12 Computation of Coordinates on a Circular Curve 731
24.13 Circular Curve Layout by Coordinates 733
24.14 Curve Stakeout Using GNSS Receivers and Robotic Total Stations 738
24.15 Circular Curve Layout by Offsets 739
24.16 Special Circular Curve Problems 742
24.17 Compound and Reverse Curves 743
24.18 Sight Distance on Horizontal Curves 743
24.19 Spirals 744
24.20 Computation of “As-Built” Circular Alignments 749
24.21 Sources of Error in Laying Out Circular Curves 752
24.22 Mistakes 752
Problems 753
Bibliography 755
25 • VERTICAL CURVES 757
25.1 Introduction 757
25.2 General Equation of a Vertical Parabolic Curve 758
25.3 Equation of an Equal Tangent Vertical Parabolic Curve 759
25.4 High or Low Point on a Vertical Curve 761
25.5 Vertical Curve Computations Using the Tangent Offset Equation 761
25.6 Equal Tangent Property of a Parabola 765
25.7 Curve Computations by Proportion 766
25.8 Staking a Vertical Parabolic Curve 766
25.9 Machine Control in Grading Operations 767
25.10 Computations for an Unequal Tangent Vertical Curve 767
25.11 Designing a Curve to Pass Through a Fixed Point 770
25.12 Sight Distance 771
25.13 Sources of Error in Laying Out Vertical Curves 773
25.14 Mistakes 774
Problems 774
Bibliography 776
26 • VOLUMES 777
26.1 Introduction 777
26.2 Methods of Volume Measurement 777
26.3 The Cross-Section Method 778
26.4 Types of Cross Sections 779
26.5 Average-End-Area Formula 780
26.6 Determining End Areas 781
26.7 Computing Slope Intercepts 784
26.8 Prismoidal Formula 786
26.9 Volume Computations 788
26.10 Unit-Area, or Borrow-Pit, Method 790
26.11 Contour-Area Method 791
26.12 Measuring Volumes of Water Discharge 793
26.13 Software 794
26.14 Sources of Error in Determining Volumes 795
26.15 Mistakes 795
Problems 795
Bibliography 798
27 • PHOTOGRAMMETRY 799
27.1 Introduction 799
27.2 Uses of Photogrammetry 800
27.3 Aerial Cameras 801
27.4 Types of Aerial Photographs 803
27.5 Vertical Aerial Photographs 804
27.6 Scale of a Vertical Photograph 806
27.7 Ground Coordinates from a Single Vertical Photograph 810
27.8 Relief Displacement on a Vertical Photograph 811
27.9 Flying Height of a Vertical Photograph 813
27.10 Stereoscopic Parallax 814
27.11 Stereoscopic Viewing 817
27.12 Stereoscopic Measurement of Parallax 819
27.13 Analytical Photogrammetry 820
27.14 Stereoscopic Plotting Instruments 821
27.15 Orthophotos 826
27.16 Ground Control for Photogrammetry 827
27.17 Flight Planning 828
27.18 Airborne Laser-Mapping Systems 830
27.19 Remote Sensing 831
27.20 Software 837
27.21 Sources of Error in Photogrammetry 838
27.22 Mistakes 838
Problems 839
Bibliography 842
28 • INTRODUCTION TO GEOGRAPHIC INFORMATION SYSTEMS 843
28.1 Introduction 843
28.2 Land Information Systems 846
28.3 GIS Data Sources and Classifications 846
28.4 Spatial Data 846
28.5 Nonspatial Data 852
28.6 Data Format Conversions 853
28.7 Creating GIS Databases 856
28.8 Metadata 862
28.9 GIS Analytical Functions 862
28.10 GIS Applications 867
28.11 Data Sources 867
Problems 869
Bibliography 871
APPENDIX A • DUMPY LEVELS, TRANSITS, AND THEODOLITES 873
APPENDIX B • EXAMPLE NOTEFORMS 888
APPENDIX C • ASTRONOMICAL OBSERVATIONS 895
APPENDIX D • USING THE WORKSHEETS FROM THE COMPANION WEBSITE 911
APPENDIX E • INTRODUCTION TO MATRICES 917
APPENDIX F • U.S. STATE PLANE COORDINATE SYSTEM DEFINING PARAMETERS 923
APPENDIX G • ANSWERS TO SELECTED PROBLEMS 927
INDEX 933
Relate keywordselementary surveying an introduction to geomatics 13th edition solutions pdf
elementary surveying an introduction to geomatics 13th edition pdf download
elementary surveying an introduction to geomatics thirteenth edition
elementary surveying an introduction to geomatics 13th edition
elementary surveying an introduction to geomatics 13th edition answers
elementary surveying an introduction to geomatics 13th edition solutions
elementary surveying – an introduction to geomatics 13th ed
elementary surveying an introduction to geomatics 13th edition solutions manual
elementary surveying an introduction to geomatics 13th edition pdf solutions
Solution Manual for Elementary Surveying: An Introduction to Geomatics, 13th Edition Charles D. Ghilani
0 notes
Text
New Post has been published on CV. AMS | Jual Total Station, Theodolite, Waterpass, Service Kalibrasi
New Post has been published on https://www.akurasimisisurvey.com/product/digital-theodolite-topcon-dt-209/
Digital Theodolite Topcon DT-209
SPESIFICATION JUAL THEODOLITE TOPCON DT 209
(9 Second Accuracy)
Telescope
Length 149 mm
Objective lens 45 mm
Magnification 30x power
Field of view 1°30′
Resolving power 2.5 power
Minimum focus 90 cm
Stadia ratio 100
Stadia constant 0
Sighting collimator Double
Electronic Angle Measurement
Method Absolute Reading
Detecting 2 horizontal sides, 1 vertical sides
Minimum reading 1″/5″ arc seconds, 0.2mgon/1mgon mgon
Accuracy 5 arc seconds, 71mm Diameter Circle
LCD 7 segments
Compensator
Sides 2
Serial signal connector RS-232C
Tilt sensor Vertical
Data Output
Serial signal connector RS-232C
Optical Plummet Telescope
Magnification 3x power
Field of view 3° degrees
Level Sensitivity
Plate level 40°/2mm
Circular level 10°/2mm
Water Protection
Standard IP66 rating
Power Supply
Battery 4AA batteries
Operating time Alk.
Theodolite only 140 Hours
Environmental
Operating Temp -20 to +50 degrees C
Keunggulan Theodolite Topcon DT 209
Jual Theodolite Topcon DT 209 sangat akurat menghitung sudut vertikal dan horisontal. Menampilkan sebuah encoder mutlak canggih dan teleskop berkualitas tinggi dengan 26x pembesaran dan menyelesaikan daya 3-inch, alat optik ini menghasilkan pengukuran sudut yang handal dan kualitas gambar yang luar biasa dari target.
Absolute Encoder
Surveyor dapat melakukan pengukuran segera setelah theodolite dihidupkan dengan encoder mutlak built-in. Teknologi ini menggunakan algoritma yang canggih untuk mengembalikan azimuth setelah kekuatan instrumen terputus, meningkatkan keandalan pengukuran sudut dan mengurangi konsumsi daya.
Fast Set-Up
The DT209 juga termasuk tribrach tetap dengan gelembung botol dan built-in anjlok optik untuk posisi yang tepat dan meratakan instrumen di jobsite.
Single Display and Functional Keys
Sebuah layar LCD besar dan panel lima tombol sederhana menyediakan Anda dengan antarmuka yang sederhana untuk dengan cepat melakukan pengukuran sudut horizontal dan vertikal.
Ultimate in Continuous Operation
Dengan nilai IP-66 untuk debu dan air perlindungan, DT 209 teodolit digital mempromosikan survei produktif bahkan dalam cuaca yang keras. Teleskop yang juga dibangun untuk mencegah kelembaban dan menghilangkan lensa fogging. Kompak dan ringan, alat survey ini menawarkan hingga 170 jam pengukuran terus menerus dalam mode sudut menggunakan empat baterai AA alkaline standar.
Paket theodolite Topcon ini dilengkapi dengan tas keras, plumb bob, tool kit, tutup pelindung tahan air, kain lensa bebas serat, baterai dan garansi distributor 1 tahun.
Akurasi 9 Detik
Pembesaran 26x
Optical Plummet
Waterproof dan tahan debu
Masa hidup baterai 140 jam
Paket Penjualan :
Unit Theodolite Topcon DT-209
Alumunium Tripod
Rambu / Bak Ukur
BELI SEKARANG DAPATKAN HARGA TERBAIK DARI KAMI
HUBUNGI KAMI
jual theodolite topcon dt 209, jual theodolite topcon dt 205l, jual theodolite topcon dt 209l, jual theodolite topcon dt 207, jual theodolite topcon dt 202l, jual theodolit topcon, harga theodolite topcon, harga theodolite topcon dt 200, harga theodolite topcon dt 209, harga theodolite topcon 209, jual theodolite topcon, harga theodolite topcon bekas, jual digital theodolite topcon dt 205l, jual digital theodolite topcon, harga theodolite topcon manual, harga theodolite merk topcon
0 notes
Text
0 notes
Photo

- Женская куртка В8996_66 - Цена и размеры: azimuthsport.ru/view_goods/zhenskaya-kurtka-azimuth-b-8996-66-myatnyj-pid-209502 ______________________________________________________ • Официальный лицензиат бренда Azimuth. • Сертифицированные товары. • Доставка по Москве и МО. • Отправка заказов по СНГ. • Гарантия на товары 30 дней(с момента получения заказа). • Приглашаем партнеров к оптовому сотрудничеству. ______________________________________________________ #azimuthsport #azimuth_official #azimuth #теплыезимниекуртки #зимниекуртки #зимниекостюмы #зимаблизко (at Зимний Сад Химки) https://www.instagram.com/p/B2vfp8YjreU/?igshid=1gcres84dizov
0 notes
Last Seen Blogs

alunasky-blog
Alunasky

floofypunz
🎸 !! floofypunz !! 🎸
pinnky
Pinkyaoi

janinegregory
eyes full of stars

bthatwoman
Untitled