
Last Seen Blogs

dreamxxdream
dreamxxdream
sherlockcorner
alone is what I have, alone protects me

indi-ak
Liraki

bowldeepfannish
Bowl deep - of katsudon fatale & other flavours -

peaceatthelakes
october
Text
CAN Bus in Industrial Automation
April 26, 2024
by dorleco
with no comment
Autonomous Vehicle Technology

Introduction to CAN Bus in Industrial Automation
As a fundamental technology, the Controller Area Network (CAN) bus has changed how machines and devices function and communicate in industrial automation, where precision, dependability, and efficient communication are essential. Industrial automation makes extensive use of the CAN Bus, which was originally developed for the automotive industry. It provides a dependable and flexible means of connecting various components of complex systems.
This introduction details the fundamental concepts, benefits, and applications of the CAN bus in industrial automation.
The Essential Building Blocks of Communication:
The foundation of industrial automation is the requirement for seamless communication between various pieces of machinery and control systems. The CAN bus, which facilitates real-time data and command transfer between sensors, actuators, controllers, and human-machine interfaces, is the backbone of this communication network.
1. Robust and reliable:
Industrial environments can be problematic, with factors like temperature fluctuations, loud noises, and electromagnetic interference posing major challenges. Because the CAN Bus in industrial automation is designed to withstand such conditions, it is very dependable. Its distinct signaling and error-checking algorithms allow for maintaining data transmission accuracy even in noisy environments.
2. Real-time data transmission:
Industrial automation relies heavily on timing. Owing to its exceptional real-time data transmission capabilities, applications that require precise synchronization and low latency should opt for the CAN bus. This ability is critical to manufacturing, robotics, and control system processes.
3. Adaptability and expandability
The scale and complexity of industrial automation systems vary widely. The outstanding scalability of the CAN bus allows for the addition of additional components and devices without requiring a major overhaul of the communication architecture. Because of its versatility and ease of integration, it is a well-liked choice across a range of industries, including aerospace and auto manufacturing.
Benefits of the CAN Bus for Industrial Automation:
1. Optimal Bandwidth Utilization
The CAN bus makes efficient use of its bandwidth by only transmitting relevant data when it is needed. This optimization ensures that urgent information is provided promptly and decreases data congestion, even in networks with several linked devices.
2. Standardized procedure
Standardized communication protocols are used by the CAN bus to enable the integration of hardware made by multiple manufacturers into a single network. Interoperability facilitates system design and maintenance.
3. Lower upkeep costs:
The reliability of CAN bus in industrial automation networks reduces the need for frequent maintenance and troubleshooting. Both labor and downtime costs decrease as a result.
4. Efficiency of energy
The CAN bus’s energy efficiency is one of its main advantages, which is important in circumstances where power consumption is an issue. Networked devices can go into low-power states when they are not actively delivering or receiving data.
5. Various Applications
Many industrial automation applications, such as manufacturing, process control, robotics, vehicle control, and more, can benefit from the flexibility and suitability of the CAN bus. Its adaptability makes it a helpful technology in many different sectors.
6. Data Accuracy:
Data integrity is safeguarded by the use of CAN bus technology’s error-checking techniques. For industrial applications where precision and safety depend on correct data, this functionality is essential.
7. The ability to tolerate faults
In industrial settings, system failures could lead to costly downtime. CAN bus networks are fault-tolerant, meaning that even if one component fails, they can still operate normally. This redundancy reduces the effects of breakdowns and ensures system reliability.
Drawbacks of the CAN Bus for Industrial Automation

The use of the Controller Area Network (CAN) bus in complex industrial systems should take into account its limitations and drawbacks, even though it offers many benefits in the field of industrial automation. The CAN bus has the following drawbacks when it comes to industrial automation:
1. Restricted Bandwidth:
Applications needing high data throughput may have problems because of the CAN bus’s limited bandwidth, particularly when working with a large number of linked devices. This limitation could affect how responsive the network is, especially for apps that need a lot of data.
2. Distance Restrictions:
The purpose of the CAN bus is to facilitate communication across short distances, typically a few meters. Applications that require longer-distance communication may need additional hardware, such as repeaters or converters, which would increase the complexity and cost of the network.
3. Diminished Rates of Data Transfer
The CAN bus may have lower data transfer rates than other, more modern communication protocols. This could be a limitation for applications that need fast data transmission, like sophisticated robots or high-speed production systems.
4. Using determinism in timing
The CAN bus allows for real-time communication; however, it may not offer as much deterministic timing as some other industrial networking technologies. This nondeterminism could be harmful for applications that have tight deadlines.
5. Maximum Message Size:
The amount of data that can be transferred in a single message frame may be restricted by the maximum message size on the map bus. When large data volumes need to be communicated, message fragmentation and reassembly can get complex and slow down transmission.
6. Identification and Intricate Configuration:
Setting up and configuring a CAN bus network can be difficult, particularly for large-scale equipment. Additionally, specialized tools and expertise may be required to diagnose and fix network issues.
7. Inadequate built-in security features
Because security was not considered during the early design phase, the CAN bus does not have any built-in security features. Today’s networked industrial systems make cyber security risks a serious concern, which leaves them exposed.
Conclusion:
In summary, the Controller Area Network (CAN) bus has revolutionized industrial automation with its many benefits, including resilience, scalability, real-time connectivity, and affordability. It now serves as a vital part in facilitating the smooth transfer of control orders and data across devices in intricate industrial systems.
It’s crucial to understand that there are some restrictions on the use of the CAN bus in industrial automation. These constraints include poorer data transfer rates in comparison to more recent protocols, restricted bandwidth, distance constraints, difficulties with deterministic timing, and message size limitations. Moreover, the necessity for extra security precautions while utilizing CAN bus technology in industrial applications has been brought to light by the changing cybersecurity landscape.
The CAN Bus in industrial automation is still an essential tool for many industrial automation applications, despite these disadvantages. Its dependability and versatility keep it a top option across a range of industries, including robotics, vehicle control, manufacturing, and process control.
The CAN bus’s viability for industrial automation ultimately comes down to the particular needs of each application. While taking into account the particular requirements of their projects, system designers and engineers must carefully weigh the trade-offs between their benefits and drawbacks. The CAN bus will probably keep developing as industrial technology advances, resolving some of its shortcomings and continuing to be an important communication platform for industrial automation systems.
Send an email to [email protected] to examine our top-notch VCU products and services and to learn more about our software development capabilities for battery-specific applications.
0 notes
Text
Traffic Management With Advanced Driver Assistance Systems (ADAS)
April 24, 2024
by dorleco
with no comment
Autonomous Vehicle Technology

Introduction
As the world becomes more urbanized, traffic congestion has become a serious issue for both commuters and city planners. When population density and the number of vehicles on the road increase, traditional traffic control strategies might not be adequate on their own. It is now acknowledged that Advanced Driver Assistance Systems (ADAS) have the potential to completely transform traffic management.
This blog article will look at how ADAS can improve traffic management, enhancing road effectiveness and safety while reducing the harmful consequences of traffic congestion on the environment:
1. The Growing Difficulty of Traffic Management
Growing urbanization has made traffic congestion a major issue in major cities across the globe. Congested roads result in longer commutes, higher fuel expenses, more pollution, and lower productivity. Conventional traffic management methods have prioritized road extensions, traffic signals, and infrastructure enhancements. Given the limitations of present solutions, a more comprehensive approach is needed to solve the complexity of today’s traffic challenges.
2. Advanced Driver Assistance Systems Overview

The goal of Advanced Driver Assistance Systems is to improve vehicle safety by incorporating a range of technologies. ADAS provides real-time information about the vehicle’s surroundings through the use of sensors, cameras, radar, and communication. Typical ADAS features include cooperative adaptive cruise control (CACC), intersection management, traffic jam assistance (TJA), and adaptive cruise control (ACC).
3. ADAS and traffic management working together
Advanced Driver Assistance Systems has several innovative features that could significantly enhance traffic management.
Adaptive Cruise Control (ACC): This feature keeps a safe following distance between cars by automatically adjusting the speed of the car in response to traffic flow. Because of this, there are fewer stop-and-go traffic patterns, which improve traffic flow and reduce congestion.
Traffic Jam Assist (TJA): TJA allows for semi-autonomous driving in crowded places by combining adaptive cruise control (ACC) and lane-keeping assistance (LKA). Through assistance with steering, acceleration, and braking, TJA relieves the strain that comes with constantly stopping and starting in traffic. This feature can significantly improve traffic flow and reduce the likelihood of collisions.
Intersection Management: Advanced Driver Assistance Systems can enhance traffic flow at intersections by utilizing vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication. Cooperative intersection collision avoidance (CICA) systems can be used to coordinate vehicles approaching a junction, reducing the likelihood of collisions and increasing traffic efficiency.
Adaptive Cruise Control with Cooperation (CACC): By enabling communication between platoons of vehicles, CACC expands the potential of ACC. Owing to the constant speed, automobiles can approach one another while maintaining a safe distance. CACC can reduce traffic and increase road capacity, especially on highways.
Predictive traffic management: Using machine learning algorithms and real-time traffic data, certain ADAS systems predict traffic patterns and congestion. This enables proactive traffic management strategies, such as dynamic rerouting and signal optimization, to lessen traffic congestion before it gets worse.

4. ADAS’s advantages for traffic management
ADAS integration in traffic management has several benefits, such as:
Safer roads: Advanced Driver Assistance Systems technology, such as junction management and collision avoidance, can significantly reduce the frequency of accidents on the road, making it safer for all users.
Reduced Congestion: By facilitating smooth traffic flow, ACC and TJA can reduce congestion, resulting in shorter travel times and lower fuel use.
Environmental Impact: By alleviating traffic congestion and promoting smoother driving patterns, ADAS helps reduce greenhouse gas emissions and other pollutants associated with stop-and-go traffic.
Enhanced Productivity: Businesses and people alike benefit from shorter travel times and less time spent stalled in traffic.
Optimal Resource Utilization: By enabling traffic management, Advanced Driver Assistance Systems can prolong the useful life of existing roadways, preventing the need for costly road expansion projects.
5. Connectivity and Data Sharing’s Role
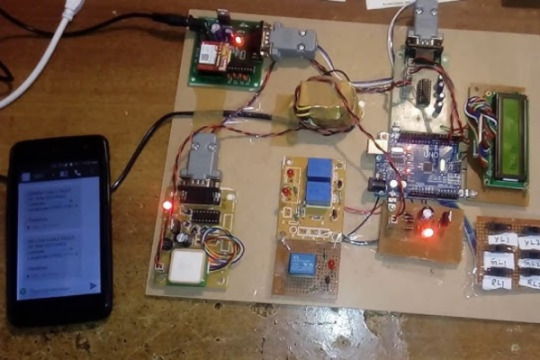
For ADAS systems to function, networking and data sharing between vehicles and infrastructure are essential. Cooperative ADAS components like CACC and intersection management depend on dependable V2V and V2I communication. V2X (vehicle-to-everything) communication advancements and 5G network development are critical to achieving the full potential of ADAS in traffic management.
6. Obstacles and Prospects
Although advanced driver assistance systems have great promise, there are still challenges that need to be solved before they can be extensively utilized and successfully incorporated into traffic management:
Infrastructure Improvements: The implementation of V2X communication calls for significant infrastructure upgrades and financial investments in intelligent transportation systems.
Cyber security issues: With ADAS systems becoming more networked, there’s a higher likelihood that vehicles and transportation infrastructure may fall victim to cyber-attacks, which makes effective cyber security measures imperative.
User Acceptance and Education: Users need to be informed about and receptive to Advanced Driver Assistance Systems for them to be extensively adopted. Drivers need to understand the advantages and disadvantages of these technologies to use them safely and effectively.
Data Privacy: Concerns about data privacy and ownership are raised by the sharing of real-time traffic statistics. Finding a balance between data exchange for traffic management and privacy protection is crucial.
Interoperability: It is necessary to guarantee interoperability across different Advanced Driver Assistance Systems technologies and vehicle models to fully utilize the benefits of these systems throughout the entire fleet of cars.

Conclusion
In conclusion, advanced driver assistance systems (ADAS) can completely change traffic management by increasing safety, reducing congestion, and minimizing the negative environmental effects of traffic congestion. Features including predictive traffic management, intersection management, ACC, TJA, and CACC hold the key to a more efficient and eco-friendly transportation system.
Resolving infrastructure, cyber security, user acceptability, and data privacy concerns is critical to ensuring that Advanced Driver Assistance Systems are seamlessly incorporated into traffic management processes. The vision of an intelligent, networked transportation system driven by ADAS is becoming closer to reality as technology advances, improving the safety, efficiency, and environmental quality of our roads for the coming generations.
#VCU#ADAS#FutureOfMobility#AutonomousDriving#VCUSupplier#VCUManufacturer#Dorleco#VCUsinElectricvehicle
0 notes
Text
VCU And Vehicle-to-vehicle (V2V communication)
April 23, 2024
by dorleco
with no comment
Autonomous Vehicle Technology

Introduction to V2V communication
Vehicle Control Units (VCUs) and Vehicle-to-Vehicle (V2V) communication are key components in forming this revolutionary environment as the automotive industry moves closer to a future of linked and autonomous vehicles. Modern cars’ brains, or VCUs, perform several vital tasks. Additionally, vehicle-to-vehicle (V2V) connectivity enables vehicles to share real-time data, enhancing overall driving pleasure, efficiency, and safety.

1. The Evolution of Control Units for Vehicles
Vehicle control units, or VCUs, are now integral components of modern cars, serving as the hub for a variety of vehicle operations. VCUs evaluate data from several sensors and systems, enabling flawless coordination of powertrains, brakes, steering, and other systems. As technology has advanced, VCUs’ ability to incorporate more complex functions has expanded, making them crucial elements in the integration of cutting-edge technologies like autonomous driving and vehicle-to-vehicle communication.
2. Comprehending Communication from Vehicle to Vehicle (V2V)
Real-time data transmission between moving automobiles is known as car-to-car (C2C) communication, often referred to as vehicle-to-vehicle (V2V) communication. Through this wireless data interchange, vehicles can exchange information about their position, speed, direction, acceleration, and brakes. By creating a network of connected automobiles that can “talk” to one another, vehicle-to-vehicle communication significantly improves both traffic efficiency and road safety.
3. The Vehicle Control Units (VCUs) and V2V Communication Technology VCUs:
Vehicle Control Units (VCUs): VCUs rely on powerful microprocessors and complex software algorithms for their technology. A vehicle’s sensors, cameras, and radars are just a few of the parts that provide input to VCUs. They process this data to expedite decision-making, enhance vehicle performance, and safeguard occupants and other road users.
Dedicated Short-Range Communication (DSRC): The primary technology used for V2V communication is DSRC, also referred to as Dedicated Short-Range Communication. It works on a certain frequency spectrum and enables fast and secure data transfer between cars within a given range, often a few hundred meters. DSRC guarantees low latency, allowing real-time communication for critical safety applications.
Cellular Vehicle-to-Everything, or C-V2X: Another V2V communication technique called C-V2X transfers data across existing cellular networks. Its advantages include the capacity for over-the-air software updates, a larger connection range, and higher data speed. More sophisticated V2X applications, like communication between cars and infrastructure (V2I) and pedestrians (V2P), may be made possible by C-V2X in addition to V2V.
4. The Role of VCUs in V2V Communication
To make vehicle-to-vehicle (V2V) communication possible, VCUs are necessary. They act as the central point for managing and connecting V2V data to other car systems. The VCU receives V2V signals, processes the data, interprets it, and makes decisions based on data from neighboring automobiles. These options include changing the speed of the car, applying the brakes, or warning the driver.

5. Advantages of V2V Communication Enabled by VCUs Enhanced Security:
Cars can communicate about intentions such as lane changes and sudden braking through vehicle-to-vehicle (V2V) communication. This common knowledge reduces the likelihood of accidents and improves overall road safety by enabling automobiles to anticipate and respond to potential dangers.
Crossroads Safety: V2V communication facilitates better traffic flow and reduces congestion at intersections by enabling cars to share information about their positions and intentions. For example, vehicles can cooperate to determine the most efficient paths through intersections without the assistance of traffic signals.
V2V communication helps drivers prevent collisions by alerting them to any hazards that might be out of their direct line of sight. When faced with an emergency, V2V-enabled vehicles can take proactive steps to avoid collisions, such as autonomous emergency braking.
Traffic Efficiency: Vehicle-to-vehicle (V2V) communication can enhance traffic flow by synchronizing vehicle speeds and merging patterns. Because of the decrease in traffic and increase in fuel efficiency, this is advantageous to both drivers and the environment.
Coordination of Emergency Services: In the event of an accident or emergency, vehicle-to-vehicle communication can alert nearby vehicles and emergency services, guaranteeing prompt assistance and swift action.
6. Integration Challenges between VCU and V2V
Even though combining VCU and V2V communication has many advantages, there are a few problems that still need to be fixed:
Standardization: The success of V2V communication depends on a standardized communication protocol. A network needs to be compatible with many automakers and V2V technologies to function well.
Cybersecurity and data privacy are problems brought about by the combination of VCUs and V2V communication. Ensuring secure communication links and protecting V2V data from unauthorized access or change is imperative.
Infrastructure Requirement: For V2V communication to be widely used, a sizable and comprehensive infrastructure — including cellular networks and roadside units — is needed. The development and implementation of such infrastructure can present financial and logistical challenges.
Acceptance by Drivers: Drivers must understand and be able to accept vehicle-to-vehicle communication. Drivers need to trust the technology and be ready to cooperate with other linked cars for the system to work.
7. Real-world implementations and Prospects
There are now multiple pilot programs for V2V communication using VCUs in various parts of the world. Several countries, including the US, Japan, and Europe, have conducted successful trials of V2V communication, and these areas are currently actively exploring its possible benefits.

Conclusion
Integrating Vehicle Control Units with Vehicle-to-Vehicle communication is a critical first step toward a safer, more efficient, and networked transportation future. The VCUs found in modern cars act as the brain, enabling fast decision-making and the synchronization of essential vehicle functions. When V2V communication is used, vehicles can communicate, share information, and convey intentions with one another while moving in a safe and tranquil environment.
As VCU and V2V technologies develop, they can completely transform driving experiences for people worldwide, enhance traffic flow, and redefine road safety. To fully reap the benefits of VCU and V2V integration, cooperation between industry players, lawmakers, and researchers is required to resolve issues and pave the road for a smooth and intelligent transportation environment.
Write to [email protected] to learn more about our software development capabilities for battery-specific requirements and to have a look at our top-notch VCU goods and services if you’re searching for the best VCU manufacturer and supplier with VCU testing and validation.
#VCU#V2VCommunication#FutureOfMobility#AutonomousDriving#VCUSupplier#VCUManufacturer#Dorleco#VCUsinElectricvehicle
0 notes
Text
VCU Testing And Validation
April 22, 2024
by dorleco
with no comment
Autonomous Vehicle Technology

Introduction
VCU Testing And Validation

In the rapidly evolving field of automotive technology, manufacturers and suppliers of vehicles are constantly coming up with new ideas to enhance performance, safety, and economy. One of the key components in charge of managing these advancements is the Vehicle Control Unit (VCU). As the brains of the car, the VCU processes data from several sensors and systems to control essential functions, including steering, brakes, and propulsion.
Given the significant hazards involved, the significance of VCU testing and validation in ensuring the dependability and safety of contemporary cars cannot be overemphasized. This blog examines the importance, challenges, and VCU testing and validation methods.
What is a vehicle control unit (VCU)?
The Vehicle Control Unit (VCU), sometimes known as the Electronic Control Unit (ECU), is a vital electronic part that oversees and controls several vehicle subsystems. The vehicle communication unit (VCU) gathers data from various sensors located throughout the vehicle, such as wheel speed, engine, and brake pressure sensors. With the use of this data, the VCU may make snap judgments that improve vehicle performance, safety, and fuel efficiency.
1. The importance of VCU Testing And Validation

VCU validation and testing are crucial processes that guarantee a car will run efficiently and safely. Robust techniques for testing and validation are necessary for the following reasons: Guaranteed security and safety are the top priorities when it comes to autos.
VCU testing ensures that safety-critical components such as anti-lock braking systems (ABS), traction control systems (TCS), and electronic stability control (ESC) function flawlessly. Validation demonstrates the VCU’s ability to react to possible threats in a way that prevents mishaps and safeguards pedestrians and passengers.
Adherence to regulations: The regulatory bodies overseeing the automotive sector establish stringent emissions, safety, and performance benchmarks. Vehicle compliance testing and validation (VCU) enables manufacturers to obtain the necessary certifications and approvals for their products by confirming that automobiles adhere to these standards.
Strength and Reliability Modern cars are subjected to harsh environmental conditions and heavy use. VCU testing shows the control unit’s resilience and dependability in the face of extreme temperatures, vibrations, and electrical disruptions, ensuring consistent functioning throughout the vehicle’s life.
Enhancement of Performance Vehicle performance optimization requires VCU testing. By analyzing data and doing simulations, manufacturers may maximize power delivery, reduce fuel consumption, and enhance overall drivability.
2. Difficulties in VCU Testing and Validation
VCU testing and validation pose several challenges that need to be carefully considered to assure accuracy and efficacy, such as the complexity of the System Modern cars are made up of several interconnected systems, each with a distinct purpose. Testing also includes addressing any potential problems and confirming the VCU’s interoperability with other subsystems.
It might be challenging to replicate real-world situations in simulators of the real world for testing. Complex simulation software and technologies are sometimes required for VCU testing to replicate different driving conditions, traffic scenarios, and potential crises.
As connected cars become increasingly common, worries about cyber security are becoming more and more pressing. VCU testing needs to focus on locating and blocking potential cyberattacks that can compromise data security and vehicle safety. Continual Updates Car software is updated frequently to fix bugs and enhance functionality. VCU testing techniques must take these changes into account to ensure compatibility and simple interaction with the existing systems.
3. Procedures for VCU Testing

Examination of Components Component testing comprises evaluating the performance of each VCU subsystem separately. Because of this, producers may find and address issues specific to each part before adding them to the system as a whole.
Hardware-in-the-Loop (HIL) testing. Real VCU hardware components are tested in HIL in synthetic environments that mimic the vehicle’s surroundings. This technique assesses the VCU’s performance in a range of operating conditions while guaranteeing safety in a controlled setting.
Software-in-the-loop (SIL) testing Software Validation (SIL) testing verifies the VCU’s software performance without utilizing hardware. Computer simulations are used in this testing. The method allows for rapid iterations and refinements of the software before the hardware integration phase.
Transport-in-the-Loop (TIL), A genuine car is equipped with the VCU as part of the VIL testing procedure. This makes it possible to do extensive real-world testing to evaluate the VCU’s performance in various driving conditions.
Conclusion
In conclusion, VCU testing and validation are crucial processes that guarantee the safe and trustworthy operation of modern cars. Manufacturers invest significant time and resources into these operations to ensure regulatory compliance, enhance performance, and, above all, ensure the safety of drivers, passengers, and pedestrians.
The methodology for VCU testing will progress in tandem with the advancement of automotive technology, incorporating innovative approaches to tackle fresh challenges and enhancing driving safety and efficiency for all.
If you are looking for the best VCU supplier and manufacturer with VCU testing and validation, write to [email protected] to find out more about our software development skills for requirements unique to batteries and explore our best VCU products and services.
0 notes
Text
VCU Communication Protocols for Smart Vehicles
April 18, 2024
by dorleco
with no comment
Autonomous Vehicle Technology

VCU Communication Protocols
Introduction
The rapidly evolving branch of automotive technology known as vehicle control units, or VCUs, has assumed the function of the brains of modern cars. These advanced electronic control units oversee and manage several vehicle systems to ensure maximum efficiency, security, and effectiveness.
One key component that makes VCUs function properly is the communication protocols they utilize to communicate with other parts of the vehicle and outside systems.
This blog will go over VCU communication protocols, their use in smart cars, and new concepts that may have an impact on future automotive communication.
The Function of Communication Protocols in VCUs
VCUs are the decision-makers in a vehicle; they gather data from various sensors and control modules and process it before sending commands to engines, actuators, and other components. To facilitate this smooth connection, VCUs rely on communication protocols, which act as a set of rules governing data transmission between various vehicle sections.
Communication protocols enable VCUs to make informed decisions about engine control, stability control, and other vehicle functions based on real-time sensor data, including wheel speed, engine temperature, and steering angle. By enabling connectivity with external systems like entertainment devices, GPS, and connected services, they also guarantee a well-integrated driving experience.
Typical VCU Protocols for Communication
In automotive applications, a variety of communication protocols are commonly used to enable VCU communication. Let’s have a look:
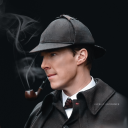
The Controller Area Network (CAN) is one of the automotive industry’s most widely used communication protocols. This reliable and strong link allows data to be transmitted between the numerous electronic control components in the car. CAN operates on a two-wire bus system and offers both high-speed and low-speed communication, making it suitable for a range of applications, such as powertrain control and infotainment systems.
The Local Interconnect Network (LIN) is an alternative communication protocol designed to provide slower data transmission within automobiles. Less important uses for it include window control, seat adjustment, and interior lighting. Because of its price and simplicity, LIN is the best choice for applications where a lot of bandwidth and real-time responsiveness are not required.

2. Flex Ray is a high-speed communication protocol that was created to satisfy the growing demands of complex automotive applications. It is appropriate for fault-tolerant real-time applications and safety-critical systems like adaptive cruise control and active suspension due to its greater bandwidth and fault-tolerant qualities.
3. Ethernet: As cars get increasingly networked and data-intensive, Ethernet is gradually finding its way into the automotive sector. The high bandwidth of Ethernet allows the numerous systems and devices within the car to connect seamlessly. It is possible to incorporate in-car entertainment, high-definition cameras, and advanced driving assistance systems (ADAS).
Protocols for VCU Communication: Problems and Advancements
Despite the significant advancements in VCU communication protocols, some difficulties remain to be addressed to meet the demands of the next generation of smart vehicles:
1. Security: As cars become more autonomous and networked, cyberattacks are increasingly likely to occur. To safeguard vehicle occupant privacy and safety, VCU communication mechanisms must be protected from potential threats. Robust authentication, intrusion detection, and encryption methods will be necessary to safeguard the integrity of data transferred between VCUs and external systems.
2. Scalability: As the number of electronic control units and sensors in cars rises, communication protocols must be able to grow accordingly. Future protocols must be able to handle the increasing volume of data while maintaining high dependability and low latency.
3. Standardization: The automobile sector involves a wide range of partners, including suppliers, technology companies, and manufacturers. Standardizing communication protocols among different automakers and car types will promote innovation and interoperability.

Future VCU Communication Protocols
The following trends will have a positive impact on the automotive industry, meaning that VCU communication protocols have a bright future ahead of them:
1. Adoption of Ethernet: Owing to its large bandwidth, Ethernet will be more prevalent in VCU communication. With the increasing prevalence of sophisticated sensor systems, in-car entertainment, and autonomous driving, Ethernet will provide the necessary infrastructure for seamless data transfer across many systems.
2. 5G Connectivity: The deployment of 5G networks will alter communication at VCU by enabling faster and more dependable data transmission. The low latency and high throughput of 5G will be advantageous for two real-time applications: autonomous driving and V2X (vehicle-to-everything) communication.
3. Time-sensitive applications such as autonomous driving and ADAS can benefit from Time-Sensitive Networking (TSN), an Ethernet advancement that aims to provide real-time capabilities. TSN’s ability to arrange and prioritize data packets will result in rapid and deterministic communication between diverse components.

Conclusion:
To sum up, VCU communication protocols enable efficient data transfer and system coordination, which are the basis of modern smart cars. As automobiles continue to advance with the advent of electrification, autonomous driving, and connected mobility, the necessity for scalable and dependable communication protocols cannot be overstated.
The deployment of TSN, the uptake of Ethernet, the deployment of 5G connections, and the seamless integration of cloud services will all have an impact on VCU’s communication landscape. VCUs will be crucial in determining the direction of the automobile industry and leading us toward a safer, more effective, and more connected future on the roads by fixing the issues and embracing these trends.
If you are seeking a trustworthy VCU supplier or would like to discuss possible partnerships for VCUs, send an email to [email protected].
0 notes
Text
Future Trends In VCUs
April 17, 2024
by dorleco
with no comment
Autonomous Vehicle Technology

Future Trends in VCUs: Overview
The automobile industry has experienced a remarkable shift in the past few years due to technological advancements. One crucial element of this change is the development of Vehicle Control Units (VCUs). These extremely sophisticated electronic control units are necessary to operate a wide range of functions in modern cars, including engine management, entertainment, and safety features. As linked mobility, electrified vehicles, and autonomous driving become closer, significant advancements in VCUs are predicted.
The worldwide market research report on vehicle control units (VCUs) offers a comprehensive analysis that takes into account crucial elements like the total market size, both at the regional and national levels, as well as market share, market growth, an examination of recent advancements, collaborations, and prospects, sales and competitive landscape analysis, anticipated product launches, technological innovations (both completed and in the works), and market share figures.
This blog looks at the new future trends in VCUs that are going to change the way we use and interact with cars:

1. Greater use of artificial intelligence (AI) integration
Artificial intelligence will be the foundation of future virtual colleges. Machine learning and deep neural networks are two examples of AI technologies that VCUs can integrate to optimize vehicle performance based on real-time data. VCUs will be able to learn from environmental elements, traffic patterns, and user preferences with the aid of AI. This will lead to better fuel efficiency, preventive maintenance, and customized driving experiences. AI-powered VCUs will enable autonomous cars to make split-second choices while ensuring the safety of their passengers.
2. Real-time processing using Edge Computing
As vehicles become more and more linked, a vast amount of data is being produced by their numerous sensors and communication systems. Real-time analysis of this data is necessary for responsive and intelligent vehicle control. Future VCUs will process data closer to their source using edge computing, reducing latency and providing faster reaction times. This will be crucial for autonomous vehicles in particular, as they must be able to make snap decisions to navigate difficult situations.
3. Cybersecurity & Over-the-Air (OTA) Updates
Future trends in VCUs will be dynamic platforms with remote upgradeability rather than static systems. OTA updates will alter car maintenance by allowing manufacturers to patch bugs, add new features, and improve performance without requiring customers to physically visit service facilities. With increased connection, cyber-attacks are still a possibility. Cyber security will be a top priority for VCU developers to protect cars and passengers from danger and to uphold the integrity and safety of the VCU ecosystem.
4. V2X Interaction for Increased Road Safety
In the future, mobility progress will be dependent on V2X communication. By enabling vehicles to communicate with people, the environment, and other vehicles, VCUs can enhance situational awareness and avoid accidents before they happen. Features enabled by V2X communication, such as Pedestrian Detection, Emergency Vehicle Signal Priority, and Intersection Collision Warnings, will make our roads safer and more efficient.
5. Energy Efficiency and Electrification
With the increasing focus on sustainability and the transition to electric cars (EVs), VCUs will be critical to optimizing energy efficiency. To extend the range and overall efficiency of EVs, advanced VCUs will handle motor control, battery performance, and regenerative braking. Furthermore, VCUs will collaborate with renewable energy sources and smart grids to smoothly incorporate clean energy into the transportation environment.
6. Customization and User Interface
Future trends in VCUs will prioritize user experience and customization, making it possible to customize the driving environment to suit personal tastes. Thanks to VCUs, which provide customized infotainment settings, climate control, and adaptive driving modes, each passenger will have a unique and enjoyable driving experience. As part of this increased personalization in autonomous driving, passengers will be able to choose from a range of autonomous driving modes according to their tastes and level of technological comfort.
7. Heads-up displays (HUDs) and augmented reality (AR)

The way drivers engage with their vehicles will fundamentally change with the introduction of AR technology into VCUs. Augmented reality-enabled heads-up displays will project important information straight into the driver’s field of vision, reducing distractions and enhancing safety. For example, drivers can get instructions while maintaining eye contact with the road thanks to roadside projection of AR navigation directions.
Conclusion
The future trends in VCUs are extremely bright, with developments in artificial intelligence, connectivity, energy economy, and user experience poised to dramatically revolutionize the automotive industry. As VCUs become smarter, more networked, and more secure systems, they will usher in a new era of smart mobility.
The idea of fully autonomous, electrified, and connected cars will become a reality with the integration of cutting-edge technologies into VCUs, improving road safety, environmental sustainability, and overall driving pleasure for all.
Send an email to [email protected] if you would like to talk about potential partnerships for electronically-controlled VCUs.
0 notes
Text
Brake-by-wire system
April 16, 2024
by dorleco
with no comment
Autonomous Vehicle Technology
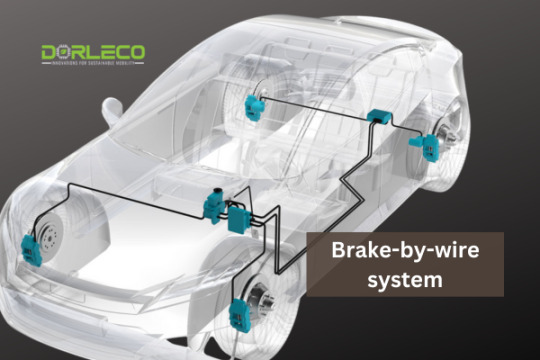
Introduction to brake-by-wire system
The brake-by-wire system, which has swept the automotive industry in recent years, includes brake-by-wire. The fundamental idea behind all brake-by-wire systems is the same: by substituting electrical connections for mechanical linkages and connections, the assemblies can be made lighter, simpler, and easier to integrate. This also applies to brake-by-wire, even though it allows for the integration of numerous systems and features, including traction control, electronic stability control, and automated emergency braking (AEB), with the brake system.

How do you use a brake-by-wire system?
The amount and haste with which the pedal is pressed are the two pieces of information that the pedal position sensor must convey to the brake control unit. Using this information, the brake control unit determines how much braking force must be given to the wheels. After receiving the necessary signals from the control unit, the actuator performs the desired deceleration, which correlates the braking force with the required pressure.
Brake-by-wire also makes it possible to customize the brake feel for specific driving modes, which is highly helpful for the interaction between the car and the driver. Even though most systems have had a similar architecture up until this point, the type of brake-by-wire system being used can affect how the caliper is actuated.
Designing Brake-By-Wire systems with redundancy
The primary distinction between brake-by-wire systems is whether or not a hydraulic circuit is used to apply pressure to the caliper. All pedal-to-caliper connections are electronic, but the industry hasn’t yet fully embraced “dry” brake-by-wire, or caliper actuation that is solely electrical.
To provide redundancy to the system, a hybrid system with one axle having a partial hydraulic circuit is employed. The electrohydraulic actuators receive the electrical signal and use their combined strength to apply hydraulic pressure to the calipers.
When the control unit detects a problem, a valve opens, cutting off all electronics and enabling a traditional hydraulic system to operate. This contributes to redundancy and raises system safety as a whole.
Safety Aspects of Wire-Based Brake Systems
Automakers can progress toward vehicle autonomy using brake-by-wire, which makes it easier to integrate the brake system with other safety measures and contributes to a safer driving experience.
1. Control of traction
The basic method of traction control is to measure wheel spin to estimate the amount of accelerative traction that is available. Then, to regulate this traction, either apply more braking pressure to a wheel that is spinning too quickly using anti-lock braking or limit the amount of power that is given to that wheel by utilizing the electronic throttle control.
Because electronically controlled braking systems allow you to adjust the amount of pressure applied to different wheels, they may be simply connected with traction control systems.
2. Control for electronic stability (ESC)
Electronic stability control is one of the most essential safety elements found in modern “smart” cars. It is just a traction control system with a few more algorithms, a more potent processor, and more electrical sensors.
When this system is engaged, the control unit controlling the motion of the vehicle makes sure that the car maintains its stability while doing particular actions. This helps to improve vehicle control by preventing oversteer and understeer, which is accomplished by adjusting the amount of braking force applied to either of the wheels on the same axles.
In the worst-case situation, the AEB system seeks to prevent or lessen the impact of a collision by activating total braking if the car still doesn’t slow down enough. Electronic control is more appropriate than mechanical control for this system since it needs to react more quickly than a typical braking technique.
3. Development of Brake-By-Wire Controls at Dorleco
Multiple safety elements can therefore be integrated with a brake-by-wire system. Granted that a brake-by-wire system that is entirely electrical can be fatal, the industry hasn’t fully embraced it yet.
However, the hybrid method will undoubtedly assist automakers in putting this technology into place and enhancing the general safety and responsiveness of future vehicles. At Dorleco, we are creating control software for brake-by-wire systems, as well as integrating and testing them in prototype cars and on a test bench.
Send an email to [email protected] if you would like to talk about potential partnerships for electronically-controlled braking systems.
0 notes
Text
All About Shift-by-Wire Technology
April 14, 2024
by dorleco
with no comment
Autonomous Vehicle Technology
Edit

Shift-by-Wire Technology
Introduction:
The automotive industry has seen significant change throughout the years due to a persistent focus on efficiency and innovation. One of the most encouraging recent developments is the introduction of shift-by-wire technology, a novel approach to transmission control. SBW introduces electronic connections in place of traditional mechanical linkages, ushering in a new era of superior car design. As we embark on this journey through the world of SBW technology, let’s analyze how this technology is poised to revolutionize the way we travel by making our automobiles smarter, safer, and more environmentally friendly.
The Evolution of Transmission Control
In automobile transmissions, the gear changer and transmission were usually physically attached. These mechanical connections have served us well, but they are not without problems. In many cases, they are unable to fulfill the demands of modern driving and might be cumbersome and prone to damage.
Introducing Shift-by-Wire Technology

SBW has made it possible to replace mechanical connections with electronic impulses. Instead of manually engaging the transmission by pushing a lever or adjusting a gear selector, drivers now engage the transmission through electronic interfaces. The transition to digital control has generated a multitude of options.
1. Smoothness and Accuracy: Gear selection is remarkably precise thanks to shift-by-wire technology. Electronic signals allow for quicker, smoother, and more accurate shifts. Drivers can enjoy a smooth and comfortable driving experience.
2. Intelligent Adaptability: SBW systems offer a high level of flexibility. They can be used in conjunction with advanced driver assistance systems (ADAS) and artificial intelligence (AI) algorithms to provide autonomous gear selection based on load, traffic conditions, and even driver behavior. This adaptive intelligence also enhances fuel efficiency and performance.
3. Decreased Mechanical Complexity: By eliminating mechanical linkages, SBW streamlines the transmission system. This lowers the need for maintenance and creates more space within the vehicle, which allows for more imaginative interior design options.
4. Eco-Friendly Driving: By optimizing gear selection and reducing emissions, shift-by-wire technology promotes fuel efficiency. Even more benefits are in store for electric and hybrid vehicles thanks to SBW’s enhanced capacity to combine electric motors with conventional transmissions.
5. Enhanced Safety: SBW technology can stop inadvertent gear changes and alert drivers in hazardous situations, among other safety features. This results in safer driving for all users of the road.
Shortly, autonomous driving will be possible, thanks in large part to shift-by-wire technology. It ensures that cars may effortlessly transition between manual and automated driving modes by enabling the seamless integration of autonomous technologies.
Benefits of Shift-by-Wire Technology

Electrical controls are utilized in shift-by-wire technology, which is typically found in automatic transmissions, to manage gear shifting in a car. When contrasting this technology with traditional mechanical systems, the following advantages can be obtained:
1. Precision and Smoothness: The precision that shift-by-wire systems offer for managing gear changes makes shifts more fluid and smooth. Driving might become more fun and calming as a result.
2. Decreased Mechanical Wear: Since shift-by-wire systems require fewer mechanical components, they frequently experience reduced wear and tear over time. As a result, transmission longevity may increase and maintenance costs may decrease.
Shift-by-wire technology can be seamlessly integrated with advanced driver assistance systems (ADAS) to improve the functionality of features like adaptive cruise control and lane-keeping assistance. It can also facilitate the development of automated driving technology.
3. Weight and Space Savings: Shift-by-wire systems can require less space and weigh less than traditional mechanical connections. As a result, vehicles might wind up being lighter, which would enhance handling and fuel efficiency.
4. Remote diagnostics: Thanks to shift-by-wire technology, automakers can monitor and diagnose issues remotely, facilitating quicker and more efficient maintenance and repair processes.
5. Decreased Noise and Vibration: Shift-by-wire systems reduce noise and vibration associated with gear changes by eliminating physical connections, which quiets the cabin and improves comfort.
Shift-by-Wire Technology Drawbacks

As was already noted, shift-by-wire technology has several benefits, but it also has certain possible drawbacks and difficulties:
1. Dependability difficulties: There are dependability difficulties with electronic systems since they are prone to malfunctions or breakdowns. Failure of the shift-by-wire technology could result in issues in choosing a gear and could put the vehicle in danger.
2. Cost: Shift-by-wire systems are usually more complex and costly to build and repair than standard mechanical connections. This may result in increased upfront costs for both automakers and customers.
3. Upkeep and Fixtures: Qualified specialists and advanced diagnostic equipment are often needed when shift-by-wire systems require maintenance or repairs. Vehicle owners may experience higher maintenance expenses and longer downtime as a result.
4. Difficulties with Adaptation: Some drivers may prefer the old-fashioned mechanical shifters’ quickness and control. Shift-by-wire systems may require some time for drivers to get used to, and this change may not be well received.
5. Risks to Cyber Security: As shift-by-wire systems become more interconnected and integrated into automotive networks, they may become vulnerable to hackers. Securing these systems is crucial to preventing unwanted access or modification.
6. Intricacy: The intricacy of shift-by-wire technology can make it more challenging to identify and fix issues with it, increasing maintenance costs and delaying problem-solving times.
Conclusion:
Let’s sum up by saying that shift-by-wire technology is a huge advancement for the car industry. It has many great features, like smooth gear changes, precise control, integration with state-of-the-art driver assistance systems, customization options, weight and space savings, safety features, adaptability to driving conditions, remote diagnostics, reduced noise and vibration, and a modern design. These benefits enhance general vehicle performance, security, convenience of driving, and fuel efficiency.
But it’s important to be aware of the potential problems and challenges that shift-by-wire technology may bring about. These include issues with compatibility, cyber security risks, increased costs, maintenance headaches, power dependence, problems with adaptation, and the need for redundancy and fail-safe systems.
Shift-by-wire technology is becoming more and more popular as manufacturers carry out intensive R&D and testing to minimize these disadvantages. It is anticipated that many of these problems will be fixed as technology advances and matures, and shift-by-wire technology will proliferate in the automotive industry, offering improved vehicle performance and driving experiences.
Consider registering for one of our training programs if you want to learn more about the technical components of shift-by-wire technology, such as modeling and reproducing them in virtual environments. For more information on how our experience developing shift-by-wire technology can help you, send an email to [email protected].
0 notes
Text
Different Types of Car Sensors and their Functions
April 11, 2024
by dorleco
with no comment
Others

car sensors
When issues or obstacles arise in your car, an electrical device known as a car sensor monitors them and alerts the driver. These automotive sensors frequently modify the engine to fit the situation. Car sensors are becoming an essential part of a modern car. The car is now smarter than before because its sole goal is to identify any threat to the vehicle and its occupants.
Previously, sensors could only be used by the engine. However, most vehicle operations now rely on a sensor, thanks to technological advancements. Car sensors monitor the car’s oxygen or fuel intake and predict any mechanical issues.
What Purposes Do Car Sensors Serve?
“Sensing” and “monitoring,” as their names suggest, are the main functions of car sensors.
The primary function of automobile sensors is data gathering and transmission to the Electronic Control System (ECS). The ECS uses algorithms to assist people in taking specific actions in a given situation.
These car sensors and ECS translate the physical and chemical change variables into electric signals, which inform the driver of additional tasks.
How do car sensors work?
Think about the human body to gain a basic grasp of the different types of car sensor and their functions.
Our five senses help us remain aware of the environment around us because we are mindful of them. Abrupt changes in our surroundings cause reflexes. Similarly, our body notifies the brain to start the proper reaction when something foreign enters our body or breaks down unexpectedly.
Cars are automotive sensors, just like these sensory organs. They let you know if there’s a problem with any of its interior parts or if something is blocking the way. Computerization and new algorithms have improved the precision of these sensing capabilities in today’s automobiles.
Automobile sensors detect issues and notify the CPU when they appear. The processor will provide the rider with further information by blinking the dashboard or screen lights or by issuing an auditory alert. Moreover, robots can initiate a reflex action in case immediate aid is required.
For instance, the fuel level sensor in your car may tell you how much fuel it has left in it. When the gasoline becomes low enough to need refueling, it will notify you. The fuel level sensor will also alert you if there is unnecessary fuel drainage or insufficient fuel in the tank. Modern cars even have GPS attached to the gasoline level sensor to enhance your driving experience.
Car Sensor Types
In recent years, modern cars have incorporated an increasing number of sensors. Enhancing a car’s detection capabilities ensures a safe and comfortable journey as well as an extended vehicle lifespan.
The modern automobile is equipped with a multitude of sensors. However, not every car has every one of them. Because of this, these 12 essential types of automotive sensors are found in almost every vehicle.
1. Oxygen Sensors

Oxygen sensors, often known as O2 sensors, monitor the oxygen content of vehicle exhaust systems. After receiving this data, the VCU makes the necessary adjustments to the air/fuel mixture to ensure optimal engine performance.
2. Mass Air Flow (MAF) Sensor

If the MAF sensor fails, the vehicle’s VCU won’t know how much fuel to inject into the combustion chamber, which will result in subpar engine performance.
3. Engine Oil Level Sensor

Maintaining an engine’s oil level at the recommended level as instructed by the manufacturer is essential to preventing catastrophic engine damage.
This sensor, which is often found on the side of the oil pan, is what causes the engine oil warning light to show on the dashboard of the majority of cars. If this light comes on, check the oil levels in your engine immediately.
4. Pressure Engine Oil Sensor

The engine oil pressure sensor, which is normally located at the base of the cylinder head, is connected to the engine oil warning light on the dashboard. In certain autos, it could also be related to the check engine warning light.
5. Coolant Temperature Sensor

Heat is the enemy of efficiency for anyone with even a cursory understanding of elementary physics. Every modern engine has a robust cooling system, which maintains the engine operating at its optimal temperature for optimal efficiency.
If the coolant temperature goes too high, the sensor sends a signal to the VCU, which causes the dashboard’s coolant temperature warning light to illuminate. If this happens, you should stop immediately to prevent the engine from overheating and perhaps seizing.
6. Coolant Level Sensor
You should only use coolants that the manufacturer has approved to provide optimal cooling and lower the risk of an overheated engine.
7. Air Intake Temperature Sensor
The temperature of the air entering the engine may affect how well the car performs. More oxygen molecules are found in colder air because it is denser, and vice versa.
The air intake temperature sensor is located between the intake filter and the intake manifold, just like the previously described MAF sensor.
When the air intake temperature sensor and MAF sensor are combined in some cars, the VCU can calculate the ideal fuel injection volume to keep the engine running efficiently.
8. Manifold Absolute Pressure (MAP) Sensor

In non-naturally aspirated engines, this sensor is usually located in the intake track or above the intake manifold. An issue with the MAP sensor may result in lower mileage and frequent engine stalling or surging.
9. Boost Pressure Sensor

Boost pressure sensors are only found in cars with forced induction, particularly in turbocharged or supercharged vehicles.
These sensors, which are frequently located inside the intake pipes of engines, could break down and cause the engine to perform less well.
Since the VCU cannot supply enough fuel for the amount of air entering the engine, failing the sensor may also result in difficulties starting the engine.
10. Engine knock sensor

Engine banging can cause serious damage to an engine. Knocking is a 4-stroke engine cycle imbalance that can occur when the air-fuel combination ignites before the ignition phase.
Ignoring a defective knock sensor can cause major harm to an engine by drastically lowering power and efficiency.
11. Air Bag Sensor

When driving carefully, airbag sensors ensure the protection of the occupants in the event of an incident. Airbag sensors are triggered by events like hard stops or high-impact pressure.
After receiving a signal from airbag sensors, the inflator system in your automobile injects nitrogen gas into the airbag. In the case of a side, rear, or front collision, this acts as a cushion.
12. Nox Sensor:

Nitrogen oxide, along with hydrocarbons and carbon monoxide, is a hazardous environmental pollutant. As a result, strict regulations are in place for emissions from vehicles that pose a risk. The composition of a vehicle’s nitrogen oxide emissions is also covered by these laws. Moreover, NOx sensors prevent your car’s exhaust system from being over-exhausted.
In cars, the selective catalytic reduction system (SCR) is adjacent to the NOx sensors.
Conclusion:
In conclusion, the plethora of automobile sensors found in modern vehicles carry out a range of functions vital to the car’s operation, security, and comfort. These sensors are expertly crafted to monitor multiple aspects of the vehicle’s surroundings and functioning, ensuring optimal efficiency and enhancing the overall driving experience.
To optimize efficiency and reduce environmental impact, engine sensors — such as mass airflow, oxygen, and coolant temperature sensors — manage essential components like engine temperature, pollutants, and air-fuel mixture.
Safety sensors like TPMS, ABS, and traction control sensors significantly improve driver safety by detecting wheel slippage, maintaining stability during braking, and monitoring tire pressure for safe handling and a lower probability of collision.
Particulate matter and EGR sensors, among other environmental sensors, are crucial for regulating emissions, ensuring compliance with legal requirements, and lessening the vehicle’s environmental effects.
Driver assistance sensors, including cameras, radars, and ultrasonic sensors, enable advanced driver assistance systems like adaptive cruise control and lane departure warning. These automotive sensors facilitate functions like autonomous driving and collision prevention while also enhancing driver awareness.
Comfort and convenience sensors, including rain, ambient light, and proximity sensors, enhance driver comfort and convenience by automatically adjusting features like interior lighting, parking aids, and windshield wipers depending on external circumstances.
As automotive technology advances, the role that sensors play in enhancing the driving experience will only increase. Together, these sensors form an advanced network that continuously gathers and processes data, providing drivers with information that will usher in a new era of safer, smarter, and ecologically friendly transportation.
1 note
·
View note
Text
Advanced Driver-Assist Features: Part 2
April 10, 2024
by dorleco
with no comment
Autonomous Vehicle Technology

Introduction to Driver-Assist Features
There has been a lot of discussion about completely autonomous vehicles, but it’s crucial to realize that this is a gradual process. A five-level framework has been established by the Society of Automotive Engineers (SAE) to define the automation level of every given vehicle. Driver-assist features that automate the choices a driver must make in specific situations need to be created and then incorporated into a unified software stack to achieve a fully autonomous, level-5 vehicle. Creating features that take care of specific duties and merging them can help development teams go from a Level-1 or Level-2 configuration to a Level-3 vehicle.
We’ll examine a few characteristics of level-1 or level-2 autonomous cars in this blog post. The Advanced Driver-Assist Features covered in this blog post are divided into two categories: passive safety measures, which just alert the driver of an impending obstruction or collision, and active safety features, which actively interact with the driver to reduce the likelihood of an accident.
1. Lane Keeping Assist:
Many traffic accidents are brought on by negligence. Driving the same route for hours on end might make the activity less thrilling, which makes the driver more likely to nod off and go to sleep. This could lead the car to stray into another lane, putting the occupants and drivers of nearby cars in danger. This type of incident is intended to be avoided with the Lane Keeping Assist feature. The system consists of a computer that determines if the car will leave the lane and visual sensors (cameras) that track lane lines.
A passive LKA merely alerts the driver that the car is about to change lanes; it does not interfere with the vehicle’s functions. Conversely, an active LKA will also make an effort to correct the vehicle’s detour from the desired path. This adjustment could entail managing the steering or the speed of a specific wheel on the front axle (the car will drift slightly to the left, for example, if the left front wheel’s speed is decreased).
2. Lane-Change Assistance

In general, poor driving situations like bad weather, night driving, or heavy fog benefit from lane change assistance. These circumstances make it impossible for the driver to perceive their surroundings clearly, so utilizing a driver-assist system such as LCA might lessen the likelihood of an accident.
The Adaptive Cruise Control system

It now detects the separation between the host car and the vehicle in front. Adaptive cruise control (ACC) has two ways to engage the throttle pedal: velocity tracking and distance tracking. This system incorporates logic to switch between these two modes based on a straightforward rule: the vehicle enters distance tracking mode if the distance between the vehicle ahead of it and the host vehicle is less than a certain threshold.
When in distance monitoring mode, the car adjusts its speed to stay a safe distance behind the front-running vehicle. The car activates the ACC system and maintains the driver-specified constant velocity when there are no obstacles within the pre-set range.
Therefore, while the ACC is activated, the driver does not need to take control of the car if there is no emergency because the system will sense the surroundings and slow down the vehicle as needed.
Developing ADAS Features at Dorleco
Consider registering for one of our training programs if you want to learn more about the technical components of these driver-assist features, such as modeling and reproducing them in virtual environments. To gain a thorough grasp of creating autonomous systems, sign up for one of our live online training sessions or take one of our online courses.
For more information on how our experience developing ADAS features can help you, send an email to [email protected].
0 notes
Text
Software-Defined Vehicle
April 9, 2024
by dorleco
with no comment
Others

Introduction
The automobile sector has been at the forefront of creative technology adoption as it continues to evolve in response to constantly shifting consumer needs. In addition, the automobile industry’s faster time-to-market for new technologies has made it possible for this sector to conduct a lot more research and development than others.
The use of software in current cars results from the development of artificial intelligence, high-speed communication and networking, and digital product engineering. Because of this, software has become more and more crucial in enabling advancements in performance features, safety, and security to provide unique driving experiences.
Megatrends including electrification, mobility, connection, and autonomous driving are expected to transform the automotive industry over the next ten years drastically. These developments are a major factor in the automotive industry’s shift to a software-centric strategy for meeting specialized needs.
When combined, these developments can potentially cause significant disruption to the automotive sector, as each is equally potent on its own. Several other terms for this industry development include CASE-connected, automated, shared, and electrified.
The three key factors influencing technology adoption in the automotive industry are mostly responsible for these recent developments in the sector:
The updated OEM requirements
Hardware and software standardization
The vehicle described by the software
What is a software-defined vehicle?
A vehicle whose primary means of operation is software is referred to as a “software-defined vehicle.” An F-35 fighter jet contains 25 million lines of code, but a luxury automobile nowadays has about 100 million.
And a space shuttle, too! This degree of sophistication is mostly attributable to cars having an increasing number of VCUs, sensors, cameras, radar, and lidar devices.
Research conducted by Accenture predicts that by 2030, software will make up 40% of a car’s overall worth. By contrast, in 2015, this percentage was only 10%. The software tsunami is being driven by features like ADAS, over-the-air (OTA) updates, cyber security, and several new services.
To handle the potentially over 300 million lines of code that a fully autonomous automobile of the near future may have, automakers and Tier 1s are turning more and more to automotive software providers.
One of the main causes pushing toward a software-defined vehicle is the growing explosion of OEM requirements for new vehicle programs. Manufacturers now concentrate on software-enabled features that benefit the customer and help them position their product in a market that is all its own.
An advance in E/E architectures that can match simplicity and capacity is being brought about by these constantly growing software needs. This necessitates the separation of software and standardization of hardware.

Advantages, difficulties, and opportunities
Recalls relating to automotive software have been increasing. Currently, automakers notify customers through letters or emails about recalls. Customers must then drive to the dealership to manually update their software.
Customers will be able to obtain updates over-the-air (OTA) in software-defined automobiles, similar to what we get on our smartphones! Along with telematics and infotainment enhancements, this technology can also monitor and adjust the powertrain and vehicle dynamics.
Custom driver experiences will be offered by the software-defined car. Huge volumes of data will be exchanged between the VCUs and DCUs and sensors and actuators, giving automakers insights unique to each car.
As a result, OEMs may be able to create a new source of income in addition to strengthening their relationship with customers.
Adopting software-centric methodologies also comes with some corporate and cultural obstacles. Reworking their supply chain connections and business models will be necessary for OEMs and Tier 1s. The automobile industry will need to upskill to implement new software tools and procedures.
For new software features to be developed and deployed effectively, the project roadmap needs to be managed more carefully and in a way that offers value.
Increased software equals increased potential for cyberattacks. An attacker can gain access to a vehicle’s systems through Wi-Fi, Bluetooth, cellular networks, and other means from anywhere on the globe.

Thus, protecting systems against such attacks requires creative solutions and reliable methods.
Since more cyber security regulations are being driven by high-security requirements, which will ultimately enhance the system, we should be able to take advantage of many more possibilities that may be present in the problems. To create software for their next car programs, OEMs must make important strategic choices. If OEMs choose to create in-house software to satisfy demands across domains, they have the opportunity to become software giants.
It’s also an option for OEMs to choose to build only a portion of the highly distinguishing domains in-house while outsourcing the other software needs.

Alternatively, they have the option to fully contract out all of their software development and services to specialist software vendors.
The software capabilities of the car of the future and its capacity to live up to expectations obtained from traditional software platforms will determine it to a large degree. The effective integration of major technology suppliers and new industry participants will open up new opportunities for the software-defined future!
This makes it possible for numerous up-and-coming automotive software technology businesses, such as Dorleco, to enter the market and establish themselves by collaborating with significant OEMs and Tier 1s. Are you trying to find a complete software package for your upcoming smart car? Send an email to [email protected] to find out more about our assistance.
#VCUs#VehicleControlUnit#softwaredefined#LiDarsensors#Autonomousvehicle#VCUSupplier#VCUManufacturer#Dorleco
0 notes
Text
Steer-By-Wire
April 9, 2024
by dorleco
with no comment
Autonomous Vehicle Technology
Edit

Introduction
The automotive industry has proposed the idea of “smart vehicles” multiple times in recent years. This idea is defined differently by each vehicle designer, with the majority of attention going toward process automation to obtain a quicker reaction. Along with sensors and actuators, this also entails substituting electrical signals for mechanical connections and linkages. Among these novel elements is the steer-by-wire technology.
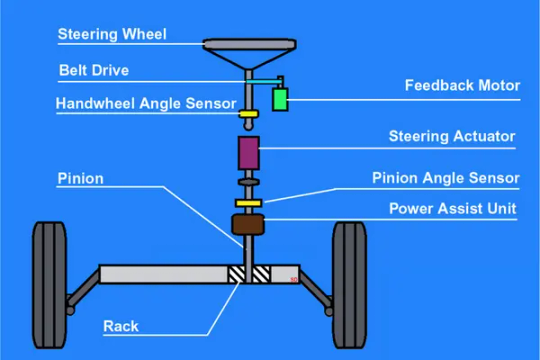
1. How a steer-by-wire system operates:
A steer-by-wire system, as you may have guessed with some accuracy, effectively substitutes the mechanical linkages with electronic connections between the steering wheel and steering rack, or the steering column.
The steering wheel position sensor gauges the driver’s desired steering angle and relays this information to the control unit, which directs the steering actuator to make the turn. The required steering torque is produced by another actuator on the steering wheel, giving the driver a realistic feel.
2. Benefits of steer-by-wire technology include:
The weight savings resulting from the steer-by-wire system’s fewer mechanical components is one of its clear benefits. This style of design also lessens general wear and tear and enhances maintenance capacity. Since there are no restrictions on where the steering wheel can be placed, it also makes more design alternatives possible.
Additionally, it is not necessary to build different steering systems for cars with left- and right-hand drives. As a result of noise and vibrations not being directly transferred, the car’s cockpit has a better acoustic design.
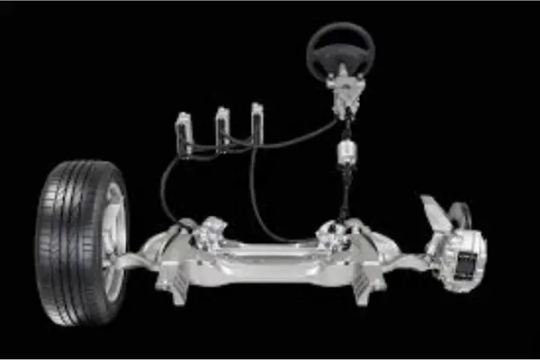
3. Steer-by-wire fail-safe mechanisms:
Even a steer-by-wire system needs some redundant systems that can take over in the event of a malfunction, just like any other x-by-wire system does. Frequently, a second steering motor is added to the arrangement so that it can take over if the primary motor loses signal strength. Controlling the amount of driving force applied to the front wheels, which would produce a steering effect, is another intriguing idea.

4. Design enhancements and optimizations:
The way the driver receives steering feedback when turning the car might be improved. The steering “feel” in a traditional steering system is limited by the steering system’s mechanics.
Nonetheless, there is a great deal of room for enhancement and optimization because the steer-by-wire system lacks any physical connections that would limit the steering feedback.
This entails giving the steering wheel additional configuration options. Software-based solutions for enhancing the feel can help reduce the amount of time needed to fine-tune it.
Using Road feedback can also help maximize the steering feel. While a typical steer-by-wire system won’t reflect any bumps to the steering wheel, some automakers attempt to use this input to enhance the ride quality of the steering wheel.
One major benefit of this type of design is that it is easy to modify the amplitude of road feedback, which allows automakers to adjust the feedback’s intensity to match the driving mode that is being chosen. (For instance, under “comfort” mode, these bumps on the road will be muted.)
Another design adjustment made possible by the steer-by-wire technology is the virtual steering ratio. The steering is solely limited by the chassis and the tuning of the vehicle reaction because there is no mechanical linkage.
Extreme rack configurations can also be simulated by varying the steering ratio, which increases the vehicle’s agility and controllability. The steering ratio is defined as the ratio of the number of degrees the steering wheel turns to the number of degrees the wheel(s) result in.
Moreover, a steering angle offset can be applied using a virtual steering ratio. This contributes to the vehicle’s increased steering stability. This can be accomplished by utilizing a steering stability assist, which uses a superimposed steering angle to stabilize the car based on input from the driver, or a steering stability controller, which adjusts the vehicle’s yaw rate to match a pre-set model.
Both are practically undetectable active safety elements that can improve the vehicle’s stability. In the event of an unusual detour from the road, they can react quicker than a human and aid in reducing the effects of steering instability.
5. Steer by Wire Controls Development at Dorleco:
Therefore, a steer-by-wire system can aid in enhancing the vehicle’s reaction while also permitting design changes and enhancements that would not be feasible with a traditional steering system. It also permits more flexibility in choosing the steering wheel’s location, reduced physical component wear and tear, and improved noise and vibration damping design for vehicles.
Our job at Dorleco is to create control algorithms and provide software for steer-by-wire systems in electric and hybrid cars.
#VCUs#VehicleControlUnit#SteerByWire#LiDarsensors#Autonomousvehicle#VCUSupplier#VCUManufacturer#Dorleco
0 notes
Text
Sensors in Autonomous Vehicles
April 5, 2024
by dorleco
with no comment
Autonomous Vehicle Technology
Edit

Introduction
The entire discussion on sensors in autonomous vehicles consists of one major point: will the vehicle’s brain (i.e., the computer) be able to make decisions just like a human brain does? Whether a computer can make these decisions is an altogether different topic. Still, it is just as important for an automotive company working on self-driving technology to provide the computer with the necessary and sufficient data to make decisions.
This is where sensors, particularly their integration with the computing system, come into the picture.
Sensor Types in Self-Driving Cars:
Autonomous vehicles employ three primary types of sensors to map their surroundings: radio-based (radar), vision-based (cameras), and light- and laser-based (LiDAR).

The following is a quick explanation of these three types of sensors found in autonomous vehicles:
1. Cameras
A 360° view of the vehicle’s surroundings can be obtained by installing high-resolution video cameras in various places around the body of the vehicle. They take pictures and give the information needed to recognize various items on the road, like people, traffic lights, and other cars.
The ability to precisely identify things is the primary benefit of utilizing data from high-resolution cameras, and this ability is utilized to map 3D representations of the environment around the vehicle. However, in bad weather—such as at night or during periods of intense rain or fog—these cameras don’t function as precisely.
Sensors based on vision that are used:
Monocular vision sensor one-sided vision One camera is used by sensors in autonomous vehicles to assist in the detection of moving objects, such as pedestrians and cars. This system will only detect categorized things because it mostly depends on object classification. By simulating millions of kilometers of travel, these algorithms may be trained to identify and categorize items. It identifies items by comparing their sizes to those that are recorded in its memory. As an illustration, suppose that an object is identified by the system as a truck. The technology may compare the size of the new truck with the size of the old truck and determine the distance based on this information. On the other hand, an object that the system is unable to classify will remain unnoticed. Developers of autonomous systems are quite concerned about this.
Stereo vision sensorA dual-camera arrangement seen in a stereo vision system aids in precisely estimating the distance to an object even when the system is unable to identify what it is. The device serves as a human eye and aids in determining an object’s depth because it has two separate lenses. The system can use triangulation to determine the distance between the object and the camera because the two lenses record slightly different images.

Radar Sensors for Self-Driving Cars Autonomous vehicles equipped with radar sensors employ radio waves to scan their surroundings and determine the precise size, angle, and velocity of objects. The object’s size, velocity, and distance from the host vehicle are all determined by the sensor, which emits radio waves through a transmitter inside and measures how long it takes for the waves to be reflected.Radar sensors have been employed in ocean navigation and weather forecasting in the past. This is because it outperforms vision-based sensors due to its very consistent performance under a wide range of weather conditions.
One way to categorize RADAR sensors is by their operational distance ranges:
The main benefit of short-range radar (SRR) sensors is that they can detect pictures with a high degree of resolution, covering a range of 0.2 to 30 meters.
This is crucial since, at low resolutions, it might not be possible to identify a pedestrian who is in front of a larger item.
MRR (Medium Range Radar): 30 to 80 meters
Long-Range Radar (LRR): (80m to more than 200m) These sensors work well with highway Automatic Emergency Braking (AEB) and Adaptive Cruise Control (ACC) systems.
2. LiDAR sensors
There are certain advantages of LiDAR (Light Detection and Ranging) over radar and vision-based sensors. It sends out thousands of fast-moving laser light waves, and when those waves are reflected, they provide a far more precise impression of the size, distance, and other characteristics of a vehicle. Numerous pulses produce unique point clouds, which are collections of points in three dimensions; hence, a LiDAR sensor may also provide a three-dimensional image of an object.
LiDAR sensors frequently have excellent precision when detecting small objects, which enhances object identification accuracy. Furthermore, LiDAR sensors can be set up to provide a 360° view of the surroundings of the car, negating the need for several identical sensors.
The disadvantage is that LiDAR sensors have a complicated architecture and design, which means that adding one to a car can result in a multiplication of manufacturing costs. Furthermore, the high processing power requirements of these sensors make it challenging to combine them into a small design. The majority of LiDAR sensors operate at 905 nm, which allows for precise data collection in a limited field of view up to 200 m.
A few businesses are also developing 1550 nm LiDAR sensors, which will be even more accurate over a greater distance.
3. Ultrasonic Sensors
The majority of uses for ultrasonic sensors in autonomous vehicles occur in low-speed driving scenarios. Ultrasonic sensors are found in the majority of parking assist systems because they can accurately measure the distance between an object and a car, regardless of the object’s size or shape.
The transmitter-receiver configuration makes up the ultrasonic sensor. The ultrasonic sound waves are sent by the transmitter, and the distance to the obstacle is computed from the time interval between the wave’s transmission and reception.
Ultrasonic sensors have a precise distance measurement range of a few millimeters to five meters. Additionally, they can detect objects at very close range from the car, which can be quite useful when parking. Additionally, ultrasonic sensors can be utilized to identify environmental factors and facilitate vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication. Sensor data from thousands of these networked cars provides reference data for various situations, conditions, and places, and can aid in the development of algorithms for autonomous vehicles.
4. Filtering Out Noise
Unwanted noise or interference in the surroundings is the primary source of uncertainty created by the use of individual sensors. Naturally, every piece of data that is detected by a sensor in the environment is made up of two parts: the noise, which we want to ignore, and the signal, which we require.
However, the uncertainty comes from not knowing how much noise there is in any given set of data. Generally speaking, high-frequency noise can lead to significant distortions in sensor data. Such high-frequency noise must be eliminated if we are to have the most precise signal possible. Linear (like the simple moving average) and non-linear (like the median) filters are the two categories of noise filters.

The noise filters that are most often utilized include:
A low-pass filter attenuates signals that are greater than the cut-off frequency while passing signals that have frequencies lower than the cut-off.
A high-pass filter attenuates signals that are lower than the cut-off frequency while passing signals that are higher than that cut-off frequency.
The Kalman filter, recursive least squares (RLS), and least mean square error (LMS) are a few other popular filters.
Development of Autonomous Vehicle Features at Dorle Controls
Our goal at Dorle Controls is to offer customized software development and integration services for self-driving cars as well. This covers both creating specific applications depending on user needs and creating the full software stack for an autonomous car.
To learn more about our skills in this field, send an email to [email protected].
#VCUs#VehicleControlUnit#sensors#LiDarsensors#Radarsensors#Autonomousvehicle#VCUSupplier#VCUManufacturer#Dorleco
0 notes
Text
Anatomy of Autonomous Vehicles
April 2, 2024
by dorleco
with no comment
Autonomous Vehicle Technology
Edit
Overview of Autonomous Vehicle
There are various ways to implement how an autonomous vehicle perceives its surroundings, makes decisions, and carries out directions. The degree of autonomy can be calculated based on all the tasks that the vehicle completes. All of these implementations, though, share basic behavior at the system level.
Due to the various methods OEMs utilize to enable self-driving technology, the extent of vehicle autonomy can be a confusing topic. The five levels of autonomy established by the Society of Automotive Engineers (SAE) are currently regarded as the industry standard. These five tiers are summed up in the figure below:
In general, Levels 1 and 2 help the driver with certain active safety features, which can come in handy in dire situations. The features only serve to improve the safety and comfort of driving—the human being is still the principal operator.
The driving becomes automatic at level 3, but under certain restricted driving circumstances, the operational design domain (ODD) is defined by these circumstances. The vehicle’s ODD increases until it reaches level 5 as the machine learning algorithms within learn how to handle edge circumstances (bad weather, unpredictable traffic, etc.).
Anatomy of a Self-Driving Car
1. Sensing system
In the architecture of autonomous vehicles, sensors are the first significant system. They observe the environment and supply the information needed to locate the car on a map. Multiple sensors are needed for any autonomous vehicle. These include cameras for computer vision-based object detection and classification, LiDARs for building 3D point clouds of the environment to identify objects precisely, radars for determining the direction and speed of other vehicles, inertial measurement units for assisting in determining the direction and speed of the vehicle, GNSS-RTK systems (such as GPS) for localizing the vehicle, ultrasonic sensors for low-range distance measurement, and many more. Positioning each sensor around the vehicle body to provide 360° sensor coverage—which aids in object detection even in the blind spot—is a crucial design factor.

The placement of several sensors to guarantee there are few blind spots is depicted in the graphic.
2. Perception
An autonomous car has a lot of sensors; therefore, to comprehend and perceive its environment, data from several sensors must be combined (a process known as sensor fusion). This requires knowing the location of the road (semantic segmentation), how things can be categorized (supervised object detection), and the position, velocity, and direction of motion of each object (car, pedestrian, etc.) (Tracking). Perception is the key to comprehending all of this.
3. Map-making and Localization
During the localization process, the car makes extremely precise three-dimensional maps of its surroundings using sensor data, and it displays the location of the vehicle on the map in real-time. Every sensor offers a different perspective on the environment, which aids in the system’s mapping of its surroundings. The host car is then located with the assistance of these maps by comparing it with the recently obtained sensor data. Depending on the sensor being used, a variety of localization techniques can be applied.
Whereas vision-based localization makes use of images, LiDAR-based localization compares its point clouds with the available 3D maps. To get high-fidelity findings, many localization algorithms additionally link Real-Time Kinematic Positioning (RTK) with a GNSS (Global Navigation Satellite System) and combine the estimates with readings from an inertial measurement unit (IMU) sensor.
4. Prediction and planning
The system must first anticipate the actions of other dynamic objects to design a route for the car to follow after localizing the vehicle. This problem can be solved by regression algorithms like decision trees, neural networks, and Bayesian regression, among others.
Subsequently, the planning block utilizes the intelligence of the vehicle to comprehend its condition in the surroundings and devise strategies to arrive at the desired location. This covers both local and global planning (e.g., the route to follow while traveling from point A to point B) and decisions on whether to halt at an intersection or plan an overtaking maneuver.
Lastly, the control block is where the actuators get the commands from the driver to carry out the plan that was decided upon in the preceding block. Typically, a feedback system works in tandem with the controller to continuously monitor how closely the car is adhering to the plan. The control mechanism can also vary depending on the type of movement to be performed and the required level of automation. Among other things, these techniques can be proportional-integral-derivative (PID), model predictive control (MPC), or linear quadratic regulators (LQR).
Dorle Controls: Development and Testing of Autonomous Systems
Our areas of expertise at Dorle Controls include functional safety, simulation, feature integration, testing, and application software development for autonomous systems. This comprises applications of data annotation services, neural networks, image processing, sensor fusion, and computer vision, along with features including AEB, ACC, LKA, LCA, FCW, park assist, road texture classification, driver monitoring, and facial landmark tracking. Write to [email protected] to learn more.
0 notes
Text
The Power of Sensor Fusion
March 29, 2024
by dorleco
with no comment
Autonomous Vehicle Technology
Edit
Introduction
Multiple sensors with different specifications, operating circumstances, and ranges are needed for autonomous vehicles. Though they are susceptible to weather variations, cameras and vision-based sensors aid in the provision of data for recognizing specific objects on the road. Radar sensors are excellent in practically all weather conditions, but they cannot produce a precise three-dimensional representation of the environment. LiDAR sensors are costly, yet they provide a highly accurate map of the vehicle’s surroundings.
The Need for Integrating Multiple Sensors
Although each sensor has a distinct function, an autonomous car cannot use either one of them on its own. An autonomous car needs information from several sources to increase accuracy and gain a greater grasp of its surroundings if it is expected to make decisions that are comparable to—or, in some situations, even superior to—those made by a human brain.
Sensor fusion, therefore, becomes a crucial element.
Sensor Fusion
In essence, sensor fusion refers to using all of the information gathered from the sensors positioned throughout the body of the car to inform judgments. This mostly aids in lowering the level of uncertainty that could otherwise be there when using individual sensors.
As a result, this combination aids in addressing each sensor’s shortcomings and creating a strong sensing system. In typical driving situations, sensor fusion typically increases system redundancy significantly. This indicates that different sensors are picking up on the same objects.
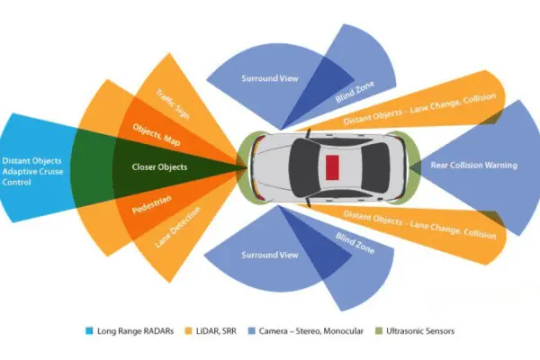
However, fusion helps guarantee that no items are missed when one or more sensors are inaccurate. For example, in perfect weather, a camera can record the surroundings of a moving car. That being said, the camera won’t give the system enough information when there is a lot of fog or rain. Here’s where LiDAR sensors and radar come in handy. In addition, a radar sensor might precisely detect the presence of a truck at the intersection where the vehicle is stopped at a red light.
It might not be able to produce data from a three-dimensional perspective, though. This is a necessity for LiDAR. Therefore, while in perfect circumstances having many sensors detect the same thing can appear redundant, in edge cases such as poor weather, sensor fusion is required.
Levels of Sensor Fusion
1. Low-Level Fusion, or Initial Fusion:
When using this type of fusion method, all of the data from all of the sensors is combined into one computer unit before it is processed. For instance, to determine the size and form of an item spotted, pixels from cameras and point clouds from LiDAR sensors are fused. Since this method transmits all of the data to the processing unit, it has a wide range of potential uses. As a result, different algorithms might make use of distinct data elements. The intricacy of processing is a disadvantage of transporting and managing such massive volumes of data. The cost of the hardware configuration will increase since high-quality processing units are necessary.
2. Fusion at the Mid-Level:
In mid-level fusion, the algorithm utilizes the data after the individual sensors have initially spotted the objects. This data is typically fused using a Kalman filter (described later in the course). The idea is to have, let’s say, a camera and a LiDAR sensor detect an obstacle individually and then fuse the results from both to get the best estimates of the vehicle’s position, class, and velocity. Although this is a simpler procedure to execute, if a sensor fails, there is a possibility that the fusion process will not succeed.
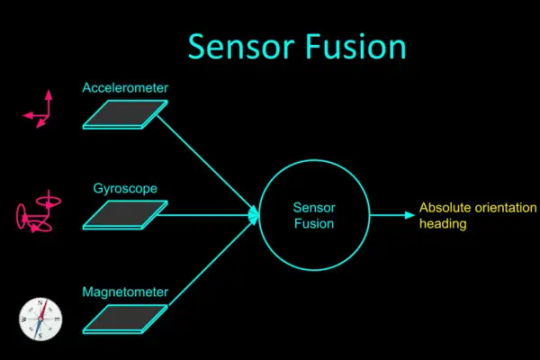
3. High-Level Fusion (Late Fusion):
This is comparable to the mid-level approach, with the exception that we fuse the outcomes after implementing detection and tracking algorithms for every single sensor. The issue is that the fusion as a whole could be impacted if there are tracking issues with one sensor.
Additionally, there are various kinds of sensor fusion. To maintain consistency, competitive sensor fusion involves having different types of sensors generate data on the same object. Through the employment of two sensors, complementary sensor-fusion will be able to create a larger picture than either sensor could on its own. Coordinated fusion will raise the data’s quality. For instance, to create a 3D representation of a 2D object, take two distinct viewpoints of it.
Variation in the approach of sensor fusion
1. Radar-LiDAR Fusion
Sensor fusion cannot be solved by a single method since different sensors have diverse functions. The mid-level sensor-fusion approach can be applied if a LiDAR and radar sensor need to be fused.
This entails combining the elements and concluding afterward.
This method can make use of a Kalman filter. This involves using a “predict-and-update” technique, in which the predictive model is updated to produce a better result in the following iteration depending on the previous prediction and the current measurement.
The following illustration illustrates this in an easier-to-comprehend manner.

The problem with the radar-LiDAR sensor is that LiDAR data is linear, whereas the data from the radar sensor is non-linear. Therefore, before being fused with the LiDAR data, the non-linear radar sensor data must be linearized, and the model is then updated appropriately.
An extended Kalman filter or an unscented Kalman filter can be used to linearize the radar data.
2. Fusion of Camera and LiDAR
Now, low-level fusion—which combines raw data—as well as high-level fusion—which combines objects and their positions—can be applied to systems that require the fusion of a camera and a LiDAR sensor. In both situations, the outcomes differ somewhat. The ROI (region of interest) matching technique and data overlap from both sensors make up the low-level fusion. The things in front of the vehicle are detected using the camera’s pictures, while the 3D point cloud data of the objects obtained from the LiDAR sensor is projected on a 2D plane.
Next, we superimpose these two maps to see if there are any common regions. The same object, identified by two separate sensors, is indicated by these similar regions. Data is first processed for high-level fusion, after which 2D camera data is transformed into 3D object detection. Following a comparison of this data with the LiDAR sensor’s 3D object detection data, the output (IOU matching) is determined by where the two sensors’ intersecting regions are.
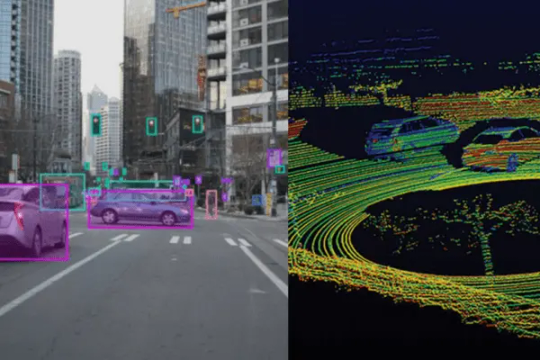
Development of Autonomous Vehicle Features at Dorleco
Among the many things we do at Dorleco is develop sensor and actuator drivers. We can help you with full-stack software development or custom feature development.
Please send an email to [email protected] for more information about our services and how we can help you with your software control needs. You can also connect with us for all VCU-related products.
0 notes
Text
FCEVs or BEVs-The Future of Mobility
March 26, 2024
by dorleco
with no comment
Autonomous Vehicle Technology
Edit
FCEVs or BEVs
Introduction
As we already know, automakers are turning to alternative energy sources to power their vehicles due to the depletion of fossil fuel deposits and the negative environmental effects of their combustion. These energy sources must be varied and sustainable, including fuel cell electric cars (FCEVs) and battery electric vehicles (BEVs).
There is much discussion about whether BEVs should take precedence over FCEVs, even if the automobile industry has already begun to look at sustainable alternatives. This is especially true given the finite supply of lithium, a key component of lithium-ion batteries. As a result, a lot of researchers are supporting the use of fuel cells, which use a redox reaction’s chemical reaction to produce energy. However, most automakers are still cautious about using fuel cells in production vehicles since research and development are still being done on how they behave in automotive batteries.
This article aims to address these concerns about the FCEVs or BEVs debate.
The Relationship between FCEVs or BEVs
In this specific argument, a common misperception is that fuel cells and lithium-ion batteries are rival technologies. It’s critical to realize that batteries, as one of the main energy sources, are here to stay in business for a very long time.
Lithium-ion and fuel cell technologies offer a range of solutions to address issues related to sustainability, pollution, and efficiency. These two substances seek to improve the answers to the electrification dilemma that the sector is now dealing with. Fuel cells are expected to complement batteries rather than replace them as the main component of the electrified solution in the future.
Difficulties in the Current Market
when discussing sustainable mobility, range is often the first factor to be questioned, particularly when discussing heavy-duty transportation. Very high-payload capacity combustion engine vehicles often have a big fuel tank, roughly 200–300 liters (50–80 gallons). This frequently enables them to travel 400 miles (depending on the payload) before needing to halt for a fuel stop. But while fuel cells and lithium-ion cells are still in their infancy, none of the technologies has yet been able to match the range requirements of heavy-duty transportation.
Furthermore, a high-capacity battery is probably going to be hefty, which raises the load and thus the energy requirement. For example, the battery in the Hummer EV is expected to weigh the same as the battery in the Honda Civic. High-energy-density batteries, sometimes known as fuel cells, are one way to break this vicious cycle.
Automotive designers will face a unique issue when it comes to heavy-duty transport because there are a lot of trade-offs when adopting Li-ion cells. The maximum permitted weights on each axle are currently capped at a lower level, which forces designers to decrease battery capacity, which reduces range.
It also reduces the amount of load a vehicle can transport on a given trip when the payload capacity is restricted, which is not exactly good logistical economics. Ultimately, automakers will always have to make a trade-off between efficiency and performance.
It is not exactly ideal logistical economics, as it also lowers the amount of load a truck can transport on a given journey when the payload capacity is limited. In the end, automakers will always have to choose between performance and efficiency.
FCEVs or BEVs
One of the reasons FCEVs presently outperform BEVs is downtime. An internal combustion engine vehicle (ICEV) requires approximately twice as much time to refill as a fuel cell electric vehicle (FCEV), which makes it a desirable option for lengthy road trips.
Creating megawatt-scale charging stations would be the answer to this problem for BEVs. Because drivers can stop as often as necessary for charging, shortening the charging period also enables designers to minimize the size (and weight) of the battery.
The ability to use renewable energy solutions more widely and hasten the adoption of sustainable power sources is another significant benefit of FCEVs. Additionally, they fill in the performance and operational deficiencies in the current batteries. When it comes to driving a style that primarily involves long-distance travel, like commercial vehicles, FCEVs can generally outperform BEVs.
Moreover, fuel cell electric vehicle (FCEV) payload capacity surpasses that of a battery electric vehicle (BEV) due to the fuel cell powertrain’s substantial weight reduction, which permits engineers to enhance the energy capacity without appreciably changing the vehicle’s overall weight. The capacity of a lithium-ion battery to satisfy the powertrain’s dynamic needs is by far its greatest advantage over a fuel cell.
Fuel cells are designed for non-dynamic/static behavior, while numerous combinations for dynamic behavior may be produced at this time. It is hoped that shortly, solid-state cell solutions for mobility will be developed by researchers in the lithium-ion battery business.
So, which is superior in every situation?
The argument over whether BEVs are preferable to FCEVs or vice versa should be seen from a different angle since it comes down to whatever technology is best suited for a certain set of transportation requirements. A greater portion of the industry can be served by BEVs, but sustainable FCEV solutions can address their drawbacks.
FCEVs with lighter powertrains can have greater range since they can hold more energy without adding to their total weight. Fuel cells are an appealing option for heavy-duty and long-distance applications because of their increased payload-bearing capability and faster charging (or refilling) times.
The disadvantage of a fuel cell is that hydrogen requires a lot of energy to produce and store, and fuel cell technology is still in its infancy. This means that fuel cells are more expensive than lithium-ion batteries. Lithium-ion batteries also have far superior dynamic behavior than fuel cells. By no means are BEVs and FCEVs two sides of the same coin. Rather, it is necessary to consider them as two distinct avenues that might be pursued to address the same issue—that is, the difficulties associated with sustainable mobility.
Initiatives for BEV and FCEV at Dorleco
At Dorleco, we create software based on models for battery chemicals and fuel cells. Development-wise, we are focusing on cell balancing algorithms and Kalman filter-based SOC estimate techniques, along with thermal modeling and control of these energy sources.
The focus is on the BMS controller and fuel cell controller integration on a CAN architecture, as well as battery validation and verification using charging and discharging experiments. Using Raptured tools, we can assist you with rapid control prototyping for battery systems as well.
Write to [email protected] to find out more about our software development skills for requirements unique to batteries and explore our best VCU products and services.
0 notes
Text
Throttle-By-Wire
March 25, 2024
by dorleco
with no comment
Autonomous Vehicle Technology
Edit

Understanding Throttle-By-Wire
The sophisticated electronic control technology known as throttle-by-wire (TBW) is set up in numerous contemporary buses, exchanges, motorbikes, and other motorized vehicles. In discrepancy to conventional mechanical throttle systems, which depend on a factual physical connection between the throttle body and the accelerator pedal, TBW backup’s electronic detectors, and selectors for this mechanical liaison.
Unnaturally, the TBW workshop converts the accelerator pedal input from the motorist into electrical impulses, which are later reused by a vehicle control unit (VCU). To calculate the proper throttle position based on variables including machine speed, cargo, and driving circumstances, the VCU interacts with several detectors located throughout the auto.
One of the technologies that has gained wide acceptance within the automotive sector is throttle-by-line. Trustability in enterprises is being raised by mechanical element wear and tear, gash, inefficiency, and growing complexity.
Automakers have started replacing crucial essential rudiments in the traditional vehicle, including the thickets, steering, throttle control, and shifter, with electromechanical or indeed entirely electronic factors. We concentrate on” throttle by line” technology in this essay. When compared to an electronically controlled steering or retardation system, this is one of the safer designs to use. This system, also called electronic throttle control (ETC), takes the place of the mechanical link that formerly connected the machine’s throttle stopcock and pedal.
Rather, there are two detectors along with a control unit.
The throttle pedal position detector is the main detector used, and its job is to measure how important it is when the motorist depresses the pedal. This detector may be a resistive position detector or a pressure detector. Because they’re less susceptible to noise, pressure detectors are generally used over resistive position detectors. The vehicle control unit (VCU) receives the gathered data, computes the necessary energy or current, and also sends this information to the Electronic Throttle Control (ETC) system. The control unit also controls how important the throttle stopcock is in response to the motorist’s requests for acceleration.
There is also another detector that keeps an eye on the throttle opening and feeds back information to the regulator so that commands to open the throttle stopcock are accurate. The pinion gear, intermediate gear, and sector gear are responsible for controlling the drop from the motor actuation angle to the throttle opening angle. This regulator is generally included within the VCU, and the CAN machine protocol is used to simplify communication between factors.
Advantages compared to mechanical control
By integrating numerous safety measures, an electronic throttle regulator can greatly ameliorate riding dynamics. Electronic throttle control systems can do more than just dissect accelerator pedal impulses, unlike mechanical systems that can modify the throttle based on motorist input.
To help correct motorist crimes and save vehicle stability, they also cover inputs from retarding movements, steering responses, and slipping and gripping the bus. The smooth integration of electronically controlled systems with other vehicle systems is one of the main benefits of these systems over their mechanical counterparts. The electronic throttle control (ETC) is an illustration of this point.
Electronic throttle control makes it easier for automakers to include other systems in the design of the auto, similar to machine operation, traction control, electronic stability control, and voyage control.
Crucial safety features in the electronic throttle regulator
Several fail-safe features are included in the electronic throttle control system, making it incredibly robust and reliable for use in any kind of vehicle. Generally, when the system notices something strange in the electronic signals that are being transferred back and forth between different corridors, it closes the throttle and keeps the machine or motor running. This safety measure is essential for avoiding unintentional acceleration, which may result in disastrous mishaps. The detector arrangement also has numerous redundancies, with one or more backup detectors allocated to each position. This ensures that the safe operation of the vehicle isn’t compromised in the event of a single detector malfunction.
Likewise, there’s concern about the possibility of mobile phone signals snooping into electronic control and communication systems. It’s essential to duly insulate the distribution of signal frequency for colorful purposes to reduce this threat. In addition, an Electronic Throttle Control (ETC) system adds a boscage-throttle override function that can be acclimated according to the driving mode, which further improves vehicle safety. For illustration, when both are engaged coincidentally during normal driving conditions on paved roads, the system gives preference to the boscage instruction.
But specialist modes like drag and drift bear certain conditions for throttle and boscage commands. Both commands may be inversely important in drift mode, whereas the throttle command takes priority in drag mode. When the motorist applies pressure to the thickets during an unintentional acceleration, this becomes further pivotal. Creating electronic connections between mechanical corridors makes it easier to put an override protocol in place, which improves productivity and guarantees dependable and responsive control.
The throttle position detector is an essential element of unrestricted-circle control, and its responsibility is increased by several fail-safe measures. Numerous original outfit manufacturers (OEMs) have formerly included this technology in their buses, and there’s presently a lot of exploration being done to ameliorate the safety and responsiveness of electronic throttle control.
Future Trends and Innovations in Throttle-By-Wire Technology
As technology advances, throttle-by-wire systems are expected to evolve with new features and integrations.
Integration with Autonomous Driving Systems
Throttle-by-wire technology plays a key role in autonomous driving by facilitating seamless vehicle control.
Sustainability and Environmental Impact
Efforts to improve fuel efficiency and reduce emissions are driving innovations in throttle-by-wire technology.
potential for Customization and Performance Tuning
Enthusiasts can explore tuning options to modify throttle-by-wire systems for enhanced performance, always considering safety implications.
Summary
Throttle-by-Wire technology has revolutionized the automotive industry, offering precise control and enhanced driving experiences. Understanding its functions, safety measures, maintenance procedures, and future developments is crucial for drivers and enthusiasts alike.
Our main goal at Dorleco is to advance control sense by exercising a tackle setup that consists of a throttle pedal, a control module, and detectors that are used to describe the position of the pedal as well as the opening of the throttle. We use feed-forward and feedback control methods in tandem to efficiently handle faults and produce extremely accurate labor.
FAQs
1. Is throttle-by-wire only found in modern vehicles?
Throttle-by-Wire technology is predominantly used in newer vehicles, but some older models may also have implemented this system.
2. Can throttle-by-wire systems be modified for increased performance?
While it is possible to tune throttle-by-wire systems for enhanced performance, it is recommended to consult with professionals to avoid compromising safety and reliability.
3. Are there any potential drawbacks to using throttle-by-wire technology?
Like any electronic system, throttle-by-wire technology can be susceptible to malfunctions or failures, which is why regular maintenance and proper troubleshooting are essential.
0 notes